鸿蒙南向开发:Hi3861 开发板两种常用烧录方式详解
在鸿蒙(OpenHarmony)开发体系中,南向开发是面向硬件设备的核心开发方向,主要聚焦于鸿蒙系统在各类终端设备上的移植、驱动开发、系统定制及应用适配,是连接鸿蒙系统与硬件设备的关键环节。不同于面向用户交互的北向应用开发,南向开发更侧重底层硬件交互,需要开发者熟悉硬件架构、驱动原理及系统内核,最终实现鸿蒙系统在具体设备上的稳定运行。
Hi3861开发板是华为海思推出的一款专为鸿蒙南向开发设计的低成本、高性能开发板,凭借轻量化、易上手的特点,成为新手入门鸿蒙南向开发的首选设备。在鸿蒙南向开发中,烧录是核心基础操作——即将编译好的鸿蒙镜像文件写入开发板,让开发板能够运行定制化的鸿蒙系统及应用。本文将以Hi3861开发板为载体,详细讲解两种最常用、最实用的烧录方式,帮助新手快速掌握烧录技巧,顺利开启鸿蒙南向开发之路。
第一种烧录方式,是直接在Visual Studio Code(以下简称VS Code)中完成程序的编译与烧录。这种方式无需切换多个工具,操作流程连贯,是日常开发中最便捷、最常用的方式之一,尤其适合新手快速上手。开发者只需在VS Code中安装对应插件,配置好开发环境后,即可直接对鸿蒙项目程序进行编译,编译完成后一键完成烧录操作,大幅提升开发效率。
一、安装Visual Studio Code及必备插件
首先前往VS Code官方下载地址:https://code.visualstudio.com/Download,根据自身操作系统(Windows、macOS、Linux)选择对应版本,按照页面提示逐步完成安装,安装完成后启动VS Code软件。
首次启动VS Code时,界面默认为英文状态,为了方便后续开发操作,同时满足鸿蒙南向开发的工具需求,我们需要安装4个核心必备插件,每个插件的功能及作用如下:
1. C/C++:核心开发插件,支持头文件搜索、代码提示、代码格式化,是编写鸿蒙底层程序的基础;
2. Chinese (Simplified):简体中文语言插件,安装后可将VS Code界面切换为中文,降低新手操作门槛;
3. Include Autocomplete:头文件自动包含插件,可自动联想并补全头文件路径,提升代码编写效率;
4. GN:专门用于查看鸿蒙项目中.gn格式文件的插件,鸿蒙南向开发中大量使用.gn配置文件,该插件可优化文件查看体验。
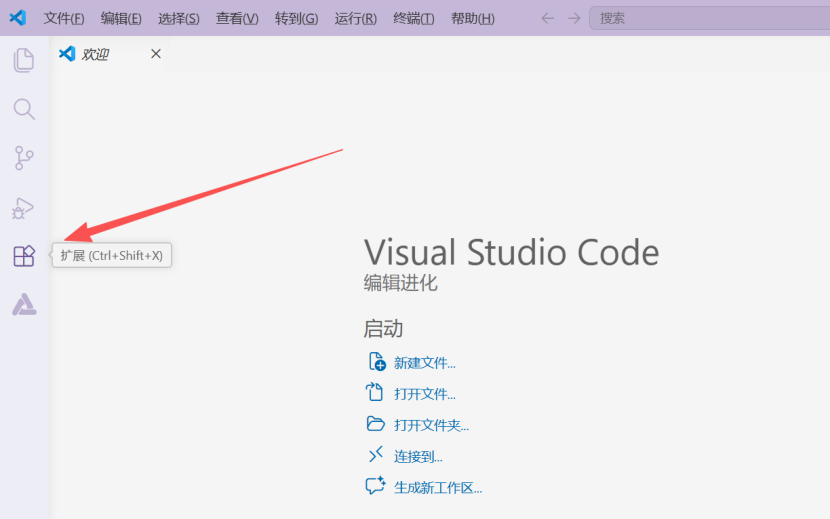
插件安装操作步骤:打开VS Code后,点击左侧导航栏中的「拓展」选项(图标为四个方块),即可进入插件搜索与安装界面(如下图所示):
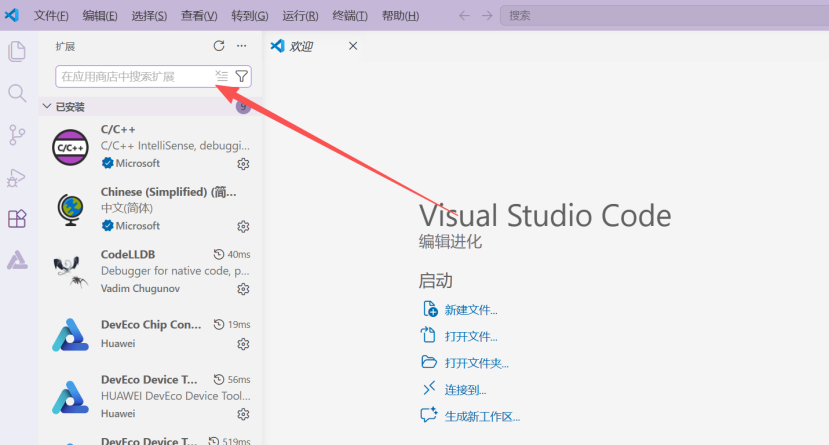
在拓展搜索框中依次输入上述四个插件名称,找到对应插件后点击安装即可,安装完成后根据提示重启 VS Code 使配置生效,操作过程如下图所示:
部分小伙伴安装中文插件后可能仍显示英文界面,此时只需先卸载 Chinese (Simplified) 插件,再重新安装,待出现语言切换提示时按提示操作,最后重启 VS Code 即可切换为中文界面。
二、安装 DevEco Device Tool
DevEco Device Tool 是 HarmonyOS 面向 IoT 设备、芯片及开发板推出的一站式集成开发工具,集工程管理、代码编辑、编译构建、固件烧录、调试仿真等功能于一体,是鸿蒙南向开发必不可少的核心工具,对后续 Hi3861 开发板的编译与烧录至关重要。
工具获取地址:https://device.harmonyos.com/cn/develop/ide/
下载对应安装包后,按照安装向导逐步完成安装即可。安装过程中,安装程序会自动检测并提示安装 Python 环境;若你的电脑已安装 Python 3.8~3.9 版本且已正确配置环境变量,可直接跳过,继续完成安装。
安装完成后,在 VS Code 的扩展商店中搜索并安装 CodeLLDB 插件,安装完毕后重启 VS Code。重启完成后,点击左侧栏的 DevEco 图标,进入主页即可启动 DevEco Device Tool 开发环境。
2. 下载 Hi3861 OpenHarmony SDK
Hi3861 OpenHarmony SDK 是针对该开发板的官方软件开发套件,包含适配好的系统源码、驱动库与示例工程。
通常购买 Hi3861 开发板后,可直接向商家客服索取配套 SDK;也可通过官方开源仓库自行下载,地址如下:
https://gitee.com/HiSpark/hi3861hduiot_application
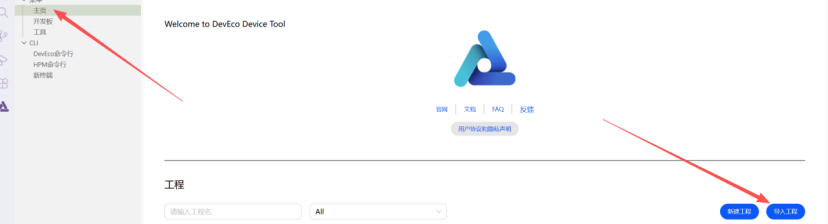
下载完成后将压缩包解压到无中文、无空格的路径下。随后在 DevEco Device Tool 主页中选择导入工程,加载已解压的 Hi3861 OpenHarmony SDK 工程即可,操作如下图所示:
选择工程目录:
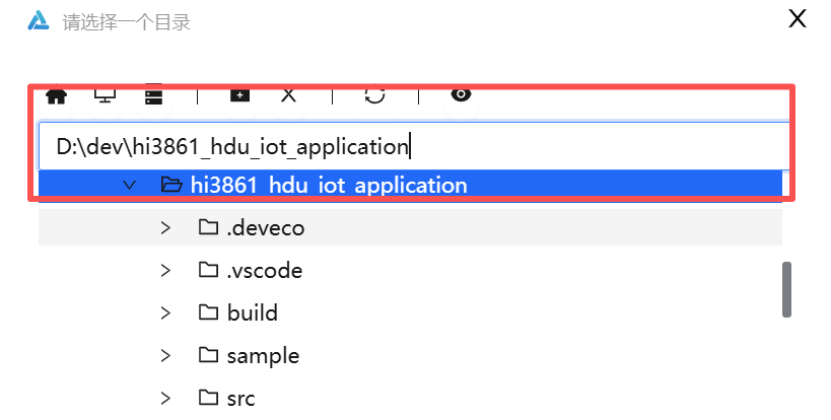
在此处务必格外注意工程目录规范:建议直接在 D 盘或其他盘符根目录下新建文件夹,将工程存放于此,否则极易导致后续编译失败。同时,工程路径中严禁出现中文、空格及特殊字符,否则会引发编译脚本识别异常。
导入工程后,我们就可以对程序代码进行编辑与修改。本文暂不深入讲解业务代码逻辑,仅用于验证编译流程是否正常。
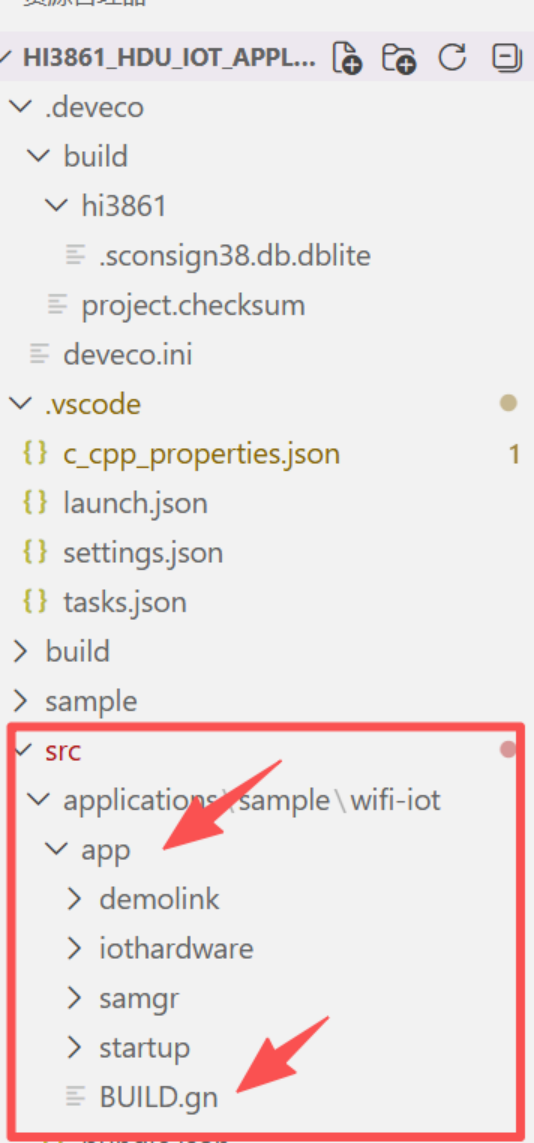
在开始编译前,我们先认识三个关键的 .gn 配置文件,首先介绍 APP 目录下的 .gn 文件。
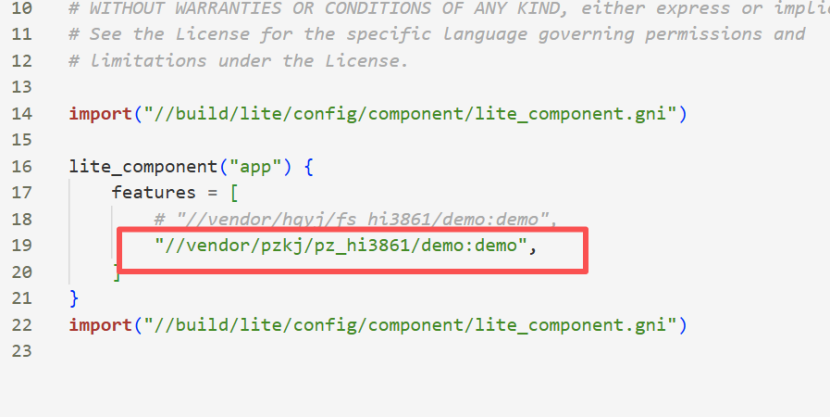
它的意思就是从源码根目录出发,找到 vendor/pzkj/pz_hi3861/demo 目录下的 BUILD.gn 文件,引用里面名字叫demo的构建目标。
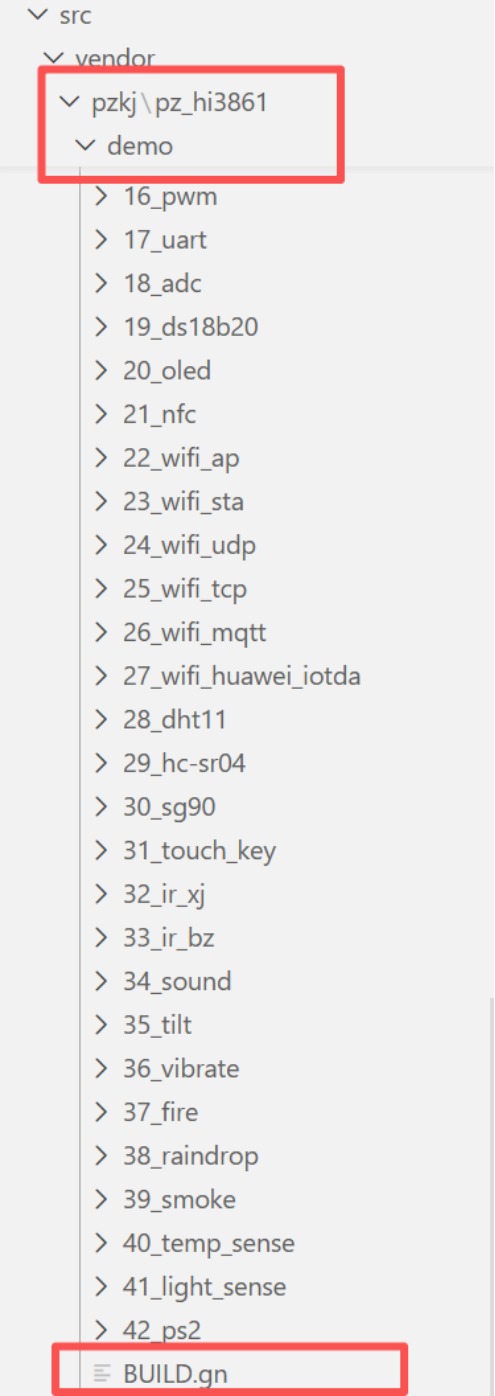
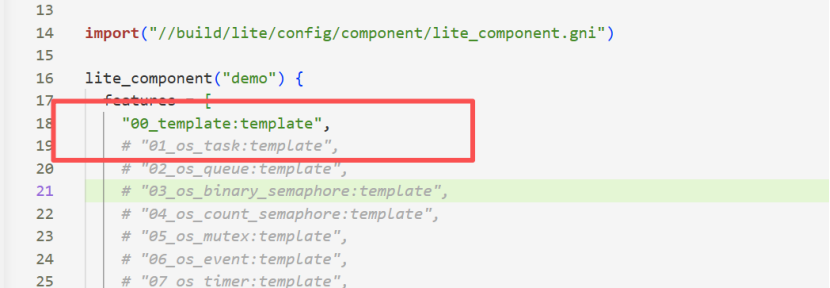
我们只需要使用第一个即可,将其他的注释掉。它的意思是:当前目录下 BUILD.gn 文件里,名字叫 template 的构建目标。接着找到这个文件,如下图:
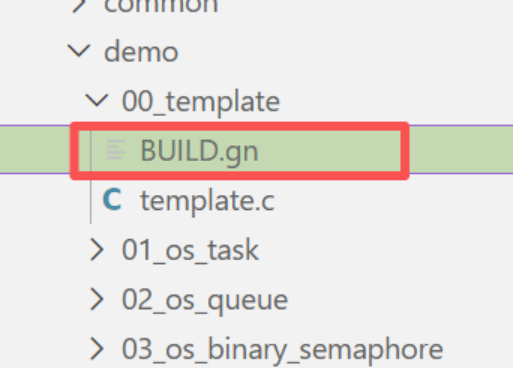
这个gn文件里面包含了.c文件和头文件的地址。
点击DevEco,进入工程配置:
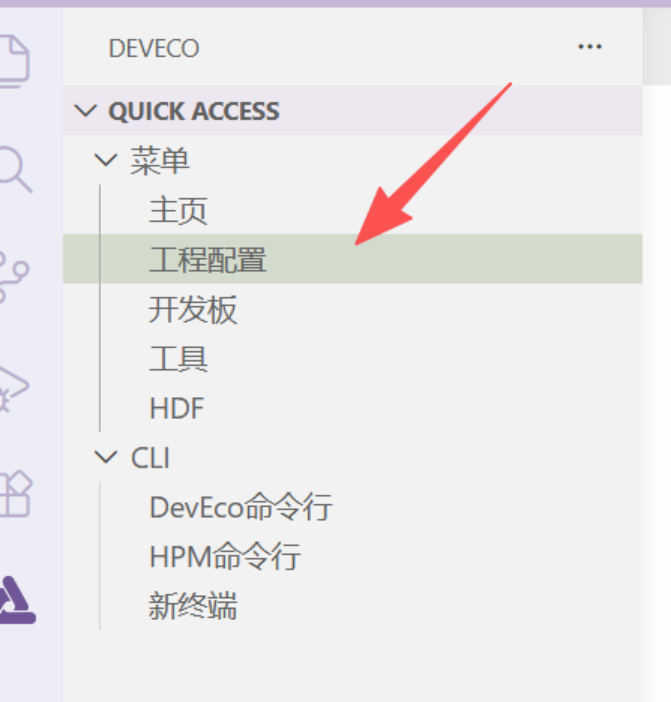
这里要需要注意选择端口号和compiler bin_path路径
如下图:

若尚未获取该工具,可前往官网或向开发板商家客服咨询获取。存放路径同样不能包含中文、空格及特殊字符,避免后续出现路径识别异常。
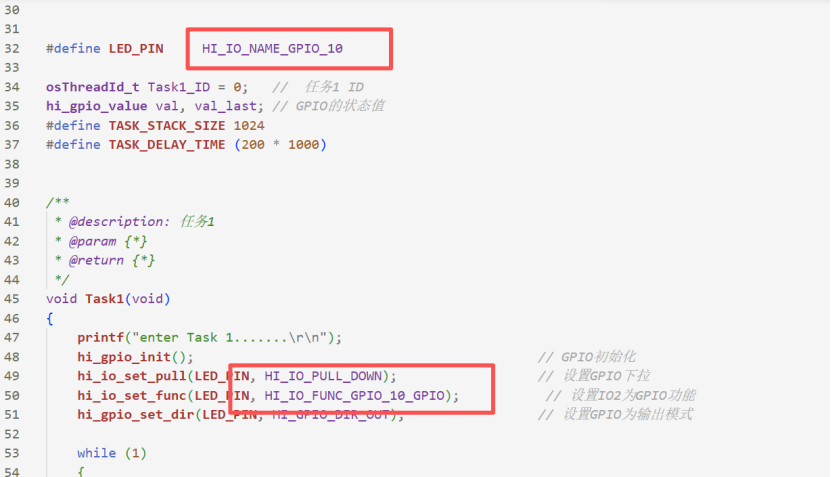
在进行代码配置时,还需对照开发板电路原理图,对 GPIO 引脚进行相应修改,确保程序与硬件引脚定义一致。
接下来:
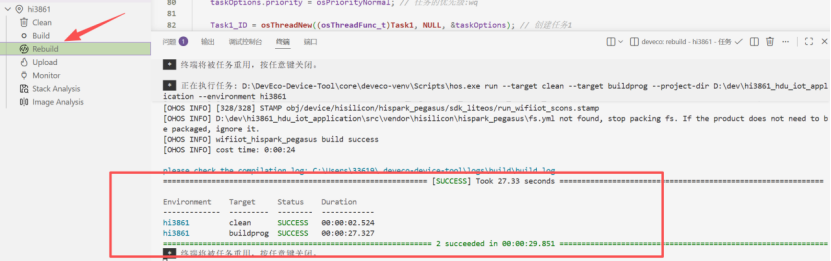
先点击Clean,然后编译,再烧录,如下如图:
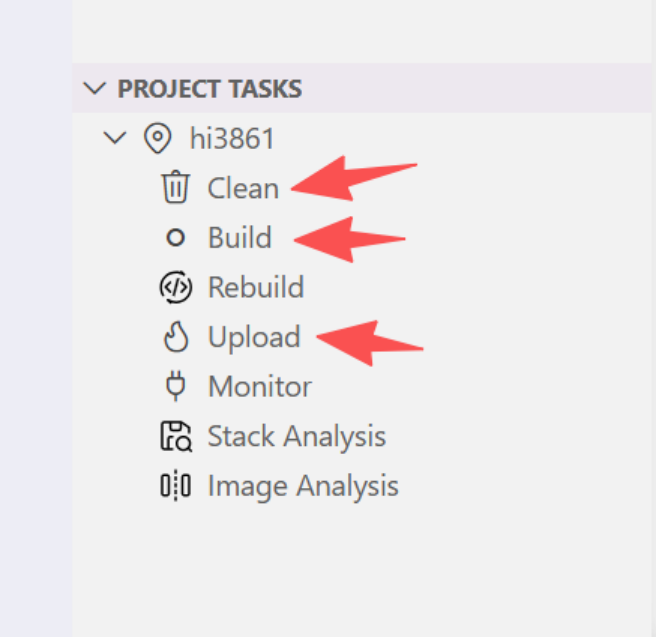
Clean--->

Build--->
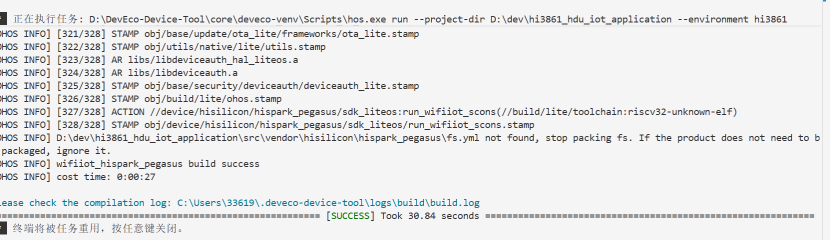
完成上述配置后,即可将 Hi3861 开发板通过 USB 线连接至电脑,点击Upload按钮开始烧录。
如果之前使用过串口类开发板,系统通常可直接识别设备;若是初次使用,需要先安装CH340 串口驱动,驱动程序可直接向开发板商家客服咨询获取。
如下图所示:
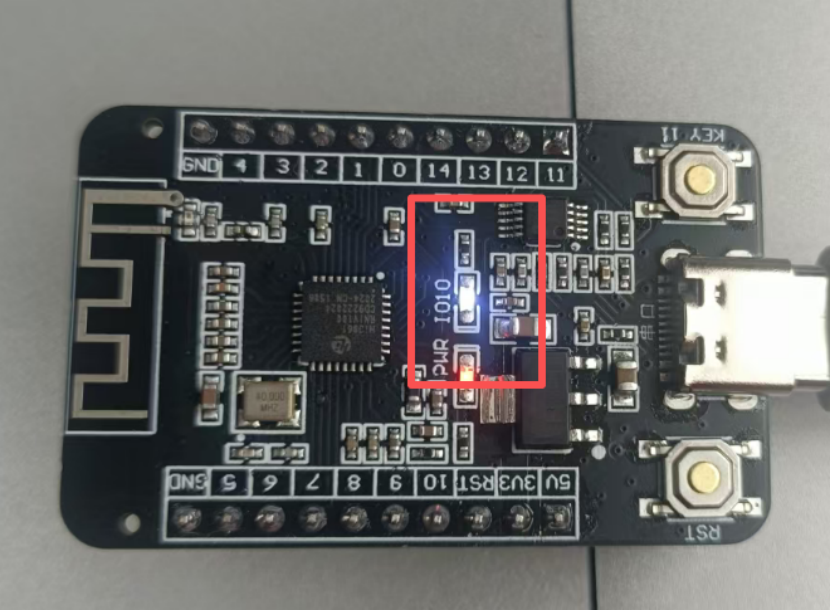
至此,整个烧录流程执行完毕,固件已成功烧录到开发板。只要严格按照上述步骤依次操作,基本都能顺利完成。
下面我们来介绍第二种烧录方式,也是很多开发者觉得更高效、更 “硬核” 的玩法:在 Ubuntu 环境下完成固件编译,再通过 HiBurn 工具将程序烧录到开发板。
三、linux下编译环境搭建
1.在 Linux 环境下进行编译,环境搭建步骤相对繁琐,对操作精度要求较高,需要大家格外细心。
本节我们将通过 VMware Workstation Pro 安装 Ubuntu 系统,相关安装教程在网上资源十分丰富,这里就不再展开赘述。
打开 Ubuntu 终端,依次执行以下命令进行安装:
sudo apt-get install samba安装完成后,可使用以下命令查看 Samba 版本及运行状态:
sudo smbstatus安装完毕后,需要为 Samba 添加访问用户与密码。
注意:添加的用户必须是 Ubuntu 系统中已存在的用户,并为其设置专门用于 Windows 访问 Samba 共享的密码。
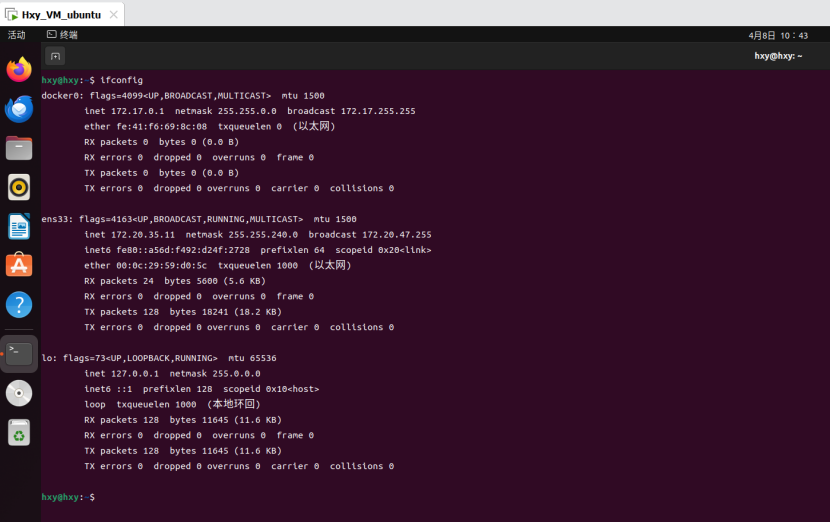
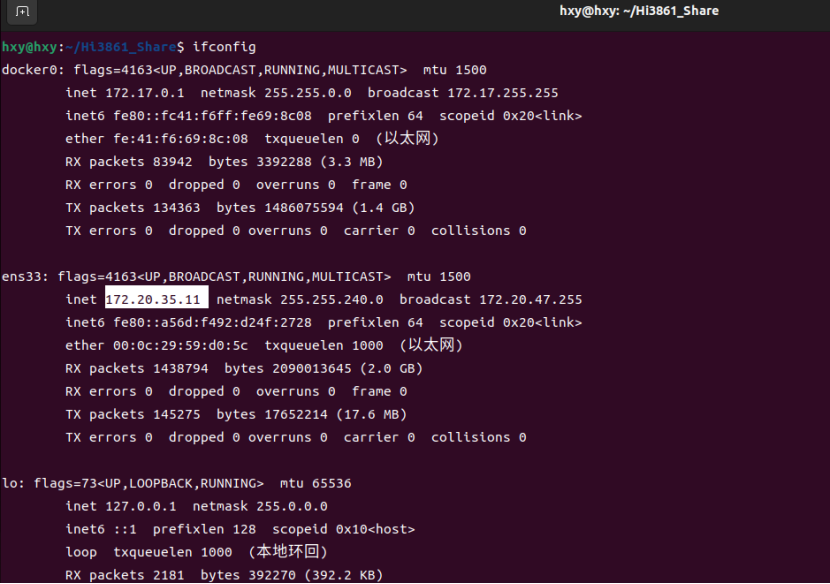
输入ifconfig
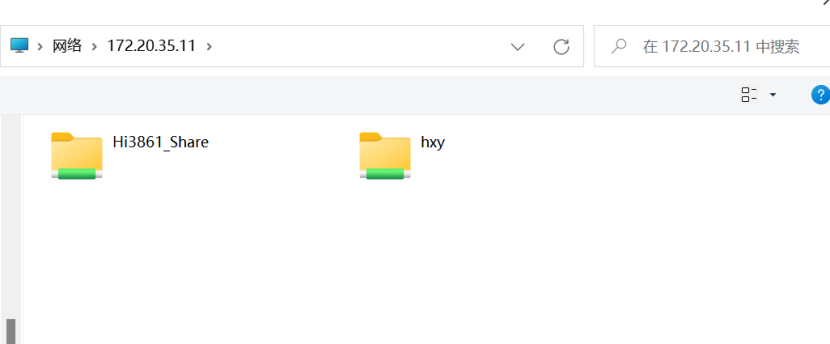
在Windows文件资源管理器中输入:

回车

输入用户名和密码
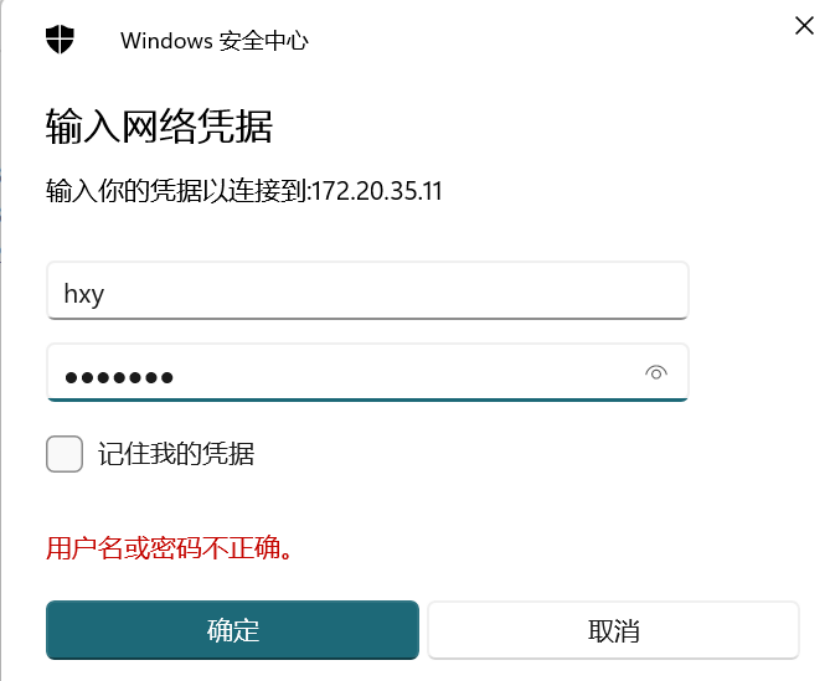
配置完成后,即可在 Windows 系统中直接访问 Ubuntu 下的共享文件,实现双系统间文件的互通与管理。
2.Docker 镜像安装
Docker 安装过程中容易出现环境、权限等问题,按照以下步骤依次操作,可有效避免安装报错,保证环境稳定可用。
安装 Docker 工具
打开 Ubuntu 终端,执行以下命令安装 Docker:
sudo apt install docker.io -y配置 Docker 用户权限
为了避免后续使用 Docker 时出现权限不足问题,依次执行以下命令配置权限:
sudo groupadd docker
sudo gpasswd -a $USER docker
newgrp docker
sudo chmod a+rw /var/run/docker.sock配置国内镜像源(提升下载速度)
直接拉取官方镜像速度较慢,配置国内镜像源是最有效的提速方案,操作步骤如下:
编辑 Docker 配置文件,执行命令创建并修改 daemon.json:
sudo mkdir -p /etc/docker
sudo tee /etc/docker/daemon.json <<-'EOF'
{
"registry-mirrors": [
"https://docker.xuanyuan.me",
"https://hub.uuuadc.top",
"https://docker.1panel.live"
]
}
EOF重启 Docker 服务使配置生效:
sudo systemctl daemon-reload
sudo systemctl restart docker验证镜像加速器是否生效:
docker info | grep -A 5 "Registry Mirrors"若终端输出配置的镜像地址,代表加速配置成功。
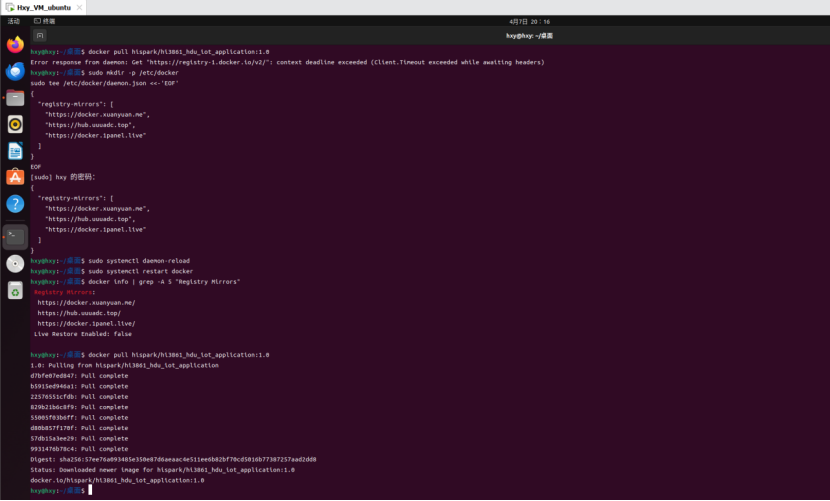
拉取 Hi3861 专用 Docker 镜像:
执行以下命令,拉取鸿蒙南向开发专用镜像文件:
docker pull hispark/hi3861_hdu_iot_application:1.0等待拉取完成,Docker 环境就全部配置完毕,可以正常使用。
操作过程如下图:
3.启动 Docker 编译环境
执行以下命令,启动 Hi3861 专用的 OpenHarmony 编译环境:
docker run -itd -p 2222:22 -v /home/hispark/code:/home/hispark --name openharmony 3bd9d23df244注意:如果 Ubuntu 系统重启,Docker 环境不会自动启动,需要手动重新加载。
可通过以下命令查看所有 Docker 容器的运行状态:
docker ps -a
如果查看容器状态时出现 Exited (255),表示容器进程已终止,退出码为 255。
此时只需要执行以下命令,重新启动对应的容器即可恢复编译环境:
docker start hi3861_dev接下来进入 Docker 编译环境,执行以下命令:
docker exec -it hi3861_dev /bin/bash
输入exit即可退出docker环境。
4.下载代码
创建文件夹(Hi3861_Share),将文件夹设置为本地网络共享,并完成共享文件夹挂载。
具体操作方法如下:
首先查看正在运行的容器:
docker ps停止指定容器
docker stop openharmony删除已停止的容器:
docker rm openharmony重新创建容器并完成目录挂载:
docker rm -f hi3861_dev
docker run -itd \
-p 2222:22 \
-v /home/hxy/Hi3861_Share:/workspace \
--name hi3861_dev \
3bd9d23df244 \
sleep infinity克隆代码仓库:
在 Ubuntu 普通终端中执行克隆操作,不要进入 Docker 环境:
git clone https://gitee.com/HiSpark/hi3861_hdu_iot_application.git /home/hxy/Hi3861_Share/进入容器验证文件:
进入 Docker 编译环境:
docker exec -it hi3861_dev /bin/bash执行以下命令查看挂载的文件:
ls /workspace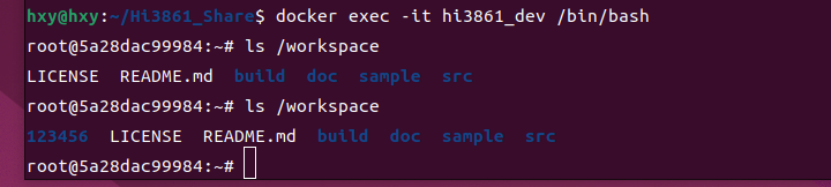
执行:exit
接着给共享文件夹添加权限:
sudo chmod -R 775 /home/hxy/Hi3861_Share
sudo chown -R $USER:$USER /home/hxy/Hi3861_Share现在到共享文件夹中执行ifconfig
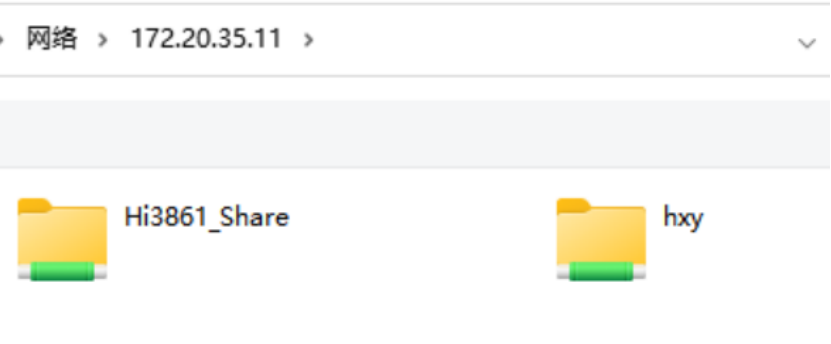
接下来,在 Windows下打开Visual Studio Code DevEco,选择文件-->打开文件夹,输入\\172.20.35.11即可
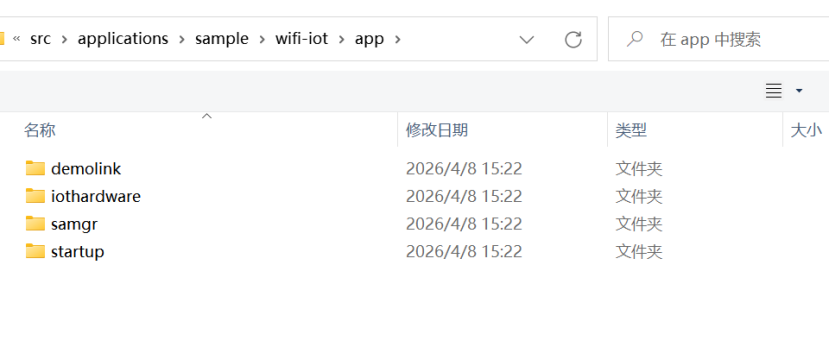
找到app,打开文件即可查修改代码
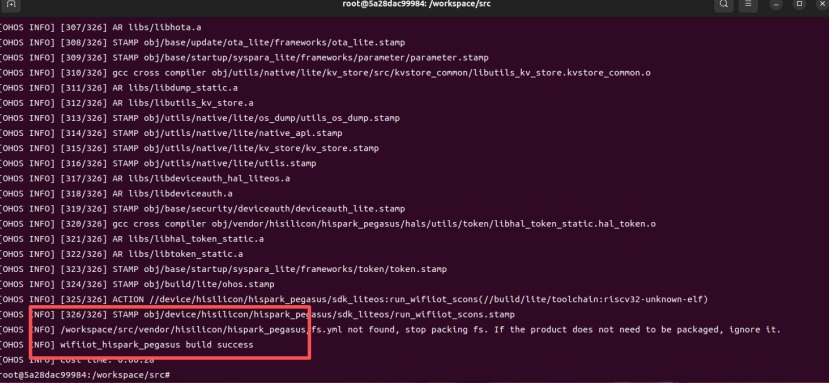
进入到docker环境中,进入src目录,执行:
hb set出现
Input code path:( 输入.回车)
执行:
hb build -f
返回Windows
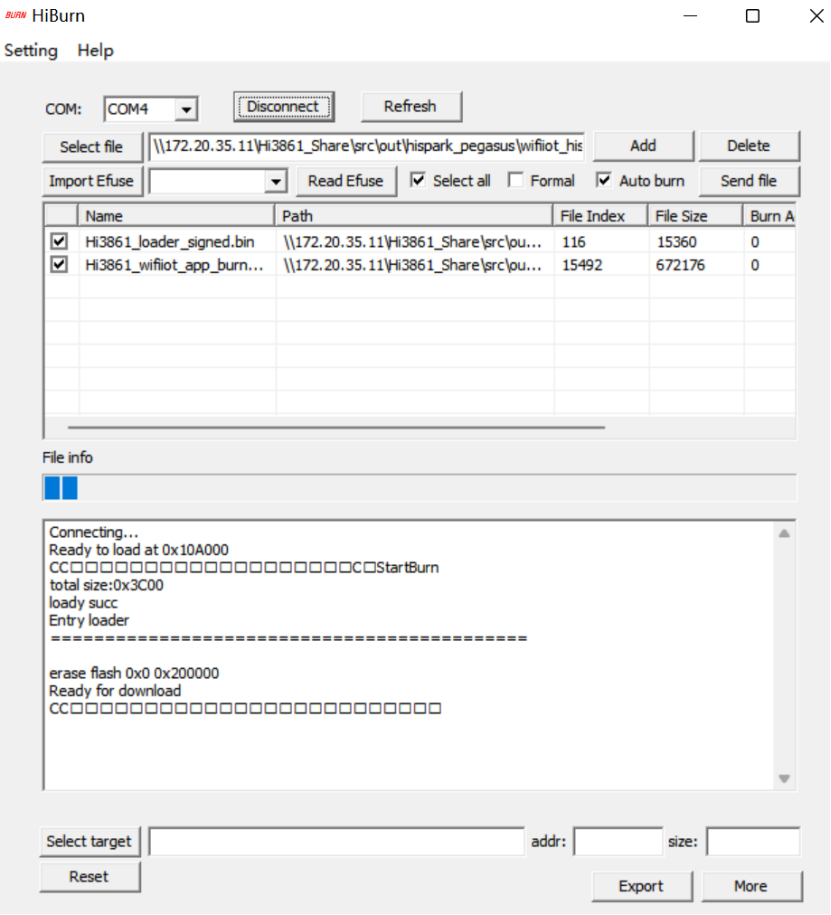
我们需要安装HiBurn工具
安装完成之后打开如下图:
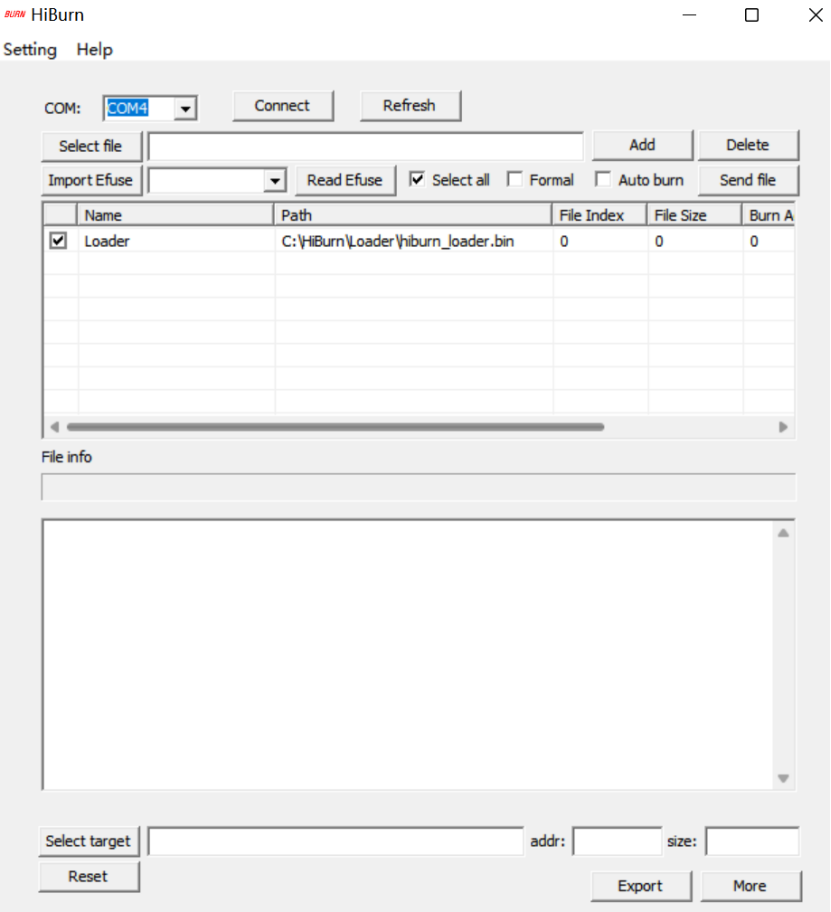
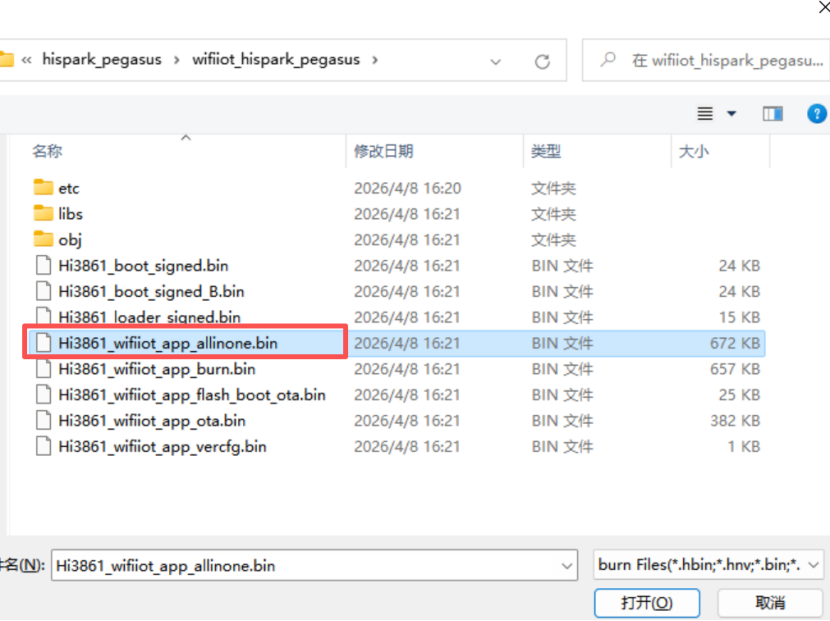
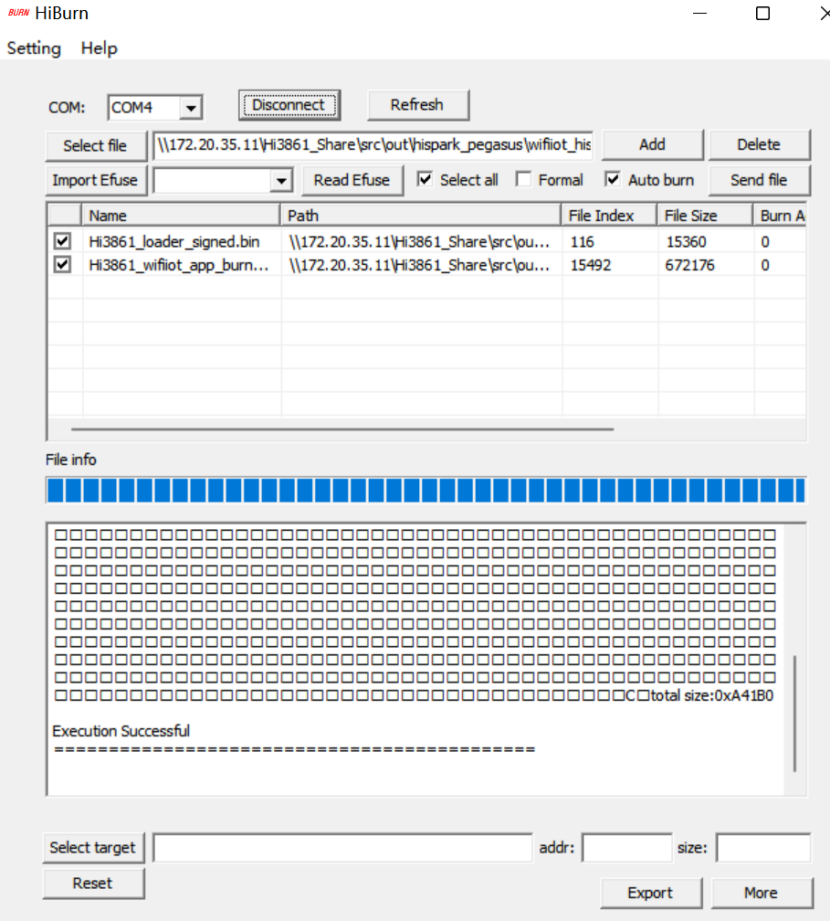
点击Select file

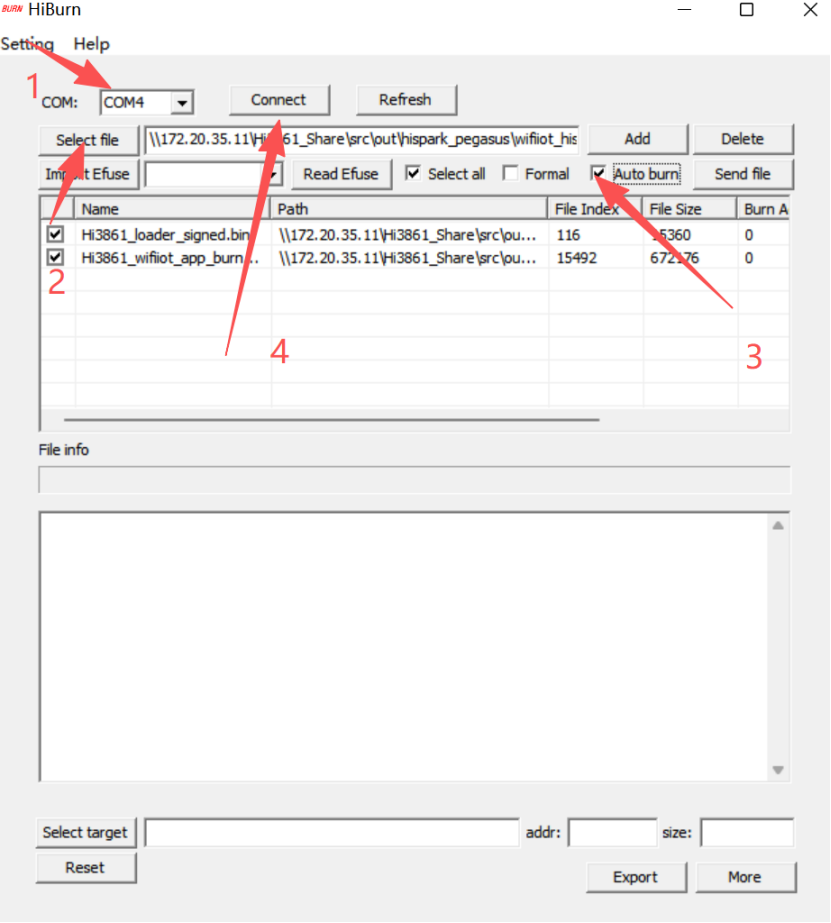
按下复位键:
安装串口调试助手,选择串口号,按下复位键:
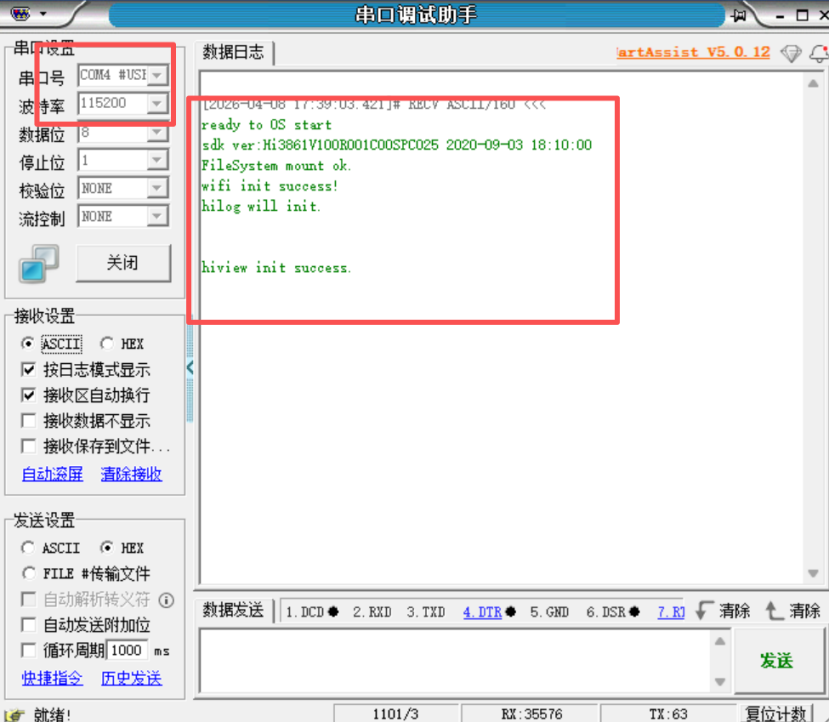
此时调试成功!!!!!!

讨论HarmonyOS开发技术,专注于API与组件、DevEco Studio、测试、元服务和应用上架分发等。
更多推荐



 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)