HarmonyOS 6.1 全栈实战录 - 03 动力捕获:AR Engine 人体骨骼点识别与体感交互引擎深度实战
HarmonyOS 6.1 AR人体骨骼识别技术解析与实战 本文深入探讨了HarmonyOS 6.1 AR Engine中人体骨骼识别的核心技术。系统通过深度学习模型实现20个关键骨骼点的实时跟踪,覆盖头部、躯干和四肢,构建完整的运动学拓扑结构。文章详细解析了ARType.BODY会话配置、坐标映射转换等核心API,并提供了Native层高性能接口的深度优化建议。最后通过"体感深蹲计数器
HarmonyOS 6.1 全栈实战录 - 03 动力捕获:AR Engine 人体骨骼点识别与体感交互引擎深度实战
引言
HarmonyOS 6.1 全栈系列更新到了第三篇,回顾下前面两篇:
- 01 篇:深入探索了 HDS (Harmony Design System) 下的“光感”交互引擎,实现了沉浸式视效的物理表达。
- 02 篇:攻克了 AR Engine 人脸微表情感知,实现了 64 维 Blend Shapes 的高精度数字镜像。
本篇目标我们解锁 AR Engine 的“人体感知”版图,深入拆解 20 个骨骼关键点 的识别与跟踪机制。我们将从 ArkTS 声明式绘制到 Native 高性能数据流,全方位构建一套企业级的体感交互引擎,并实战开发一个“体感健身计数器”。骨骼识别和追踪也是HarmonyOS 6.1新提供的能力:
一、 核心感知模型:20 骨骼点与动力学拓扑
在 HarmonyOS 6.1 的 AR Engine 中,人体跟踪不再仅仅是简单的“轮廓检测”,而是基于深度学习模型的 运动学拓扑重建。系统能够实时识别并输出 20 个关键骨骼点,这构成了体感游戏、虚拟试衣、以及手势指令的核心。而且HarmonyOS 提供的骨骼点识别追踪能力不止支持单人,还支持双人。
1.1 20 骨骼点布局深度解析
AR Engine 识别的 20 个骨骼点覆盖了人体的主要关节,其索引与语义定义严格遵循生物力学标准:
- 头部与躯干(Core Hub):
NOSE(0): 头部定位点。NECK(1): 颈部转动支点。LEFT_SHOULDER(2) /RIGHT_SHOULDER(5): 肩膀宽度基准。LEFT_HIP(8) /RIGHT_HIP(11): 骨盆支撑点。
- 上肢动力链(Upper Extremities):
LEFT_ELBOW(3) ->LEFT_WRIST(4): 左臂运动轨迹。RIGHT_ELBOW(6) ->RIGHT_WRIST(7): 右臂运动轨迹。
- 下肢支撑链(Lower Extremities):
LEFT_KNEE(9) ->LEFT_ANKLE(10): 左腿支撑强度。RIGHT_KNEE(12) ->RIGHT_ANKLE(13): 右腿支撑强度。
人体骨骼点示意图如下: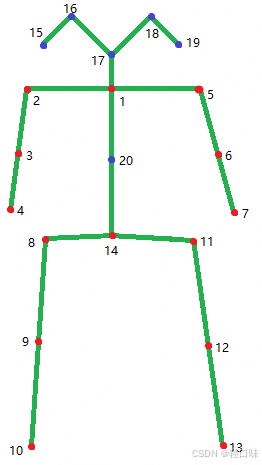
1.2 拓扑链接关系与运动矢量
单纯的点坐标无法构成“人体”,关键在于 Skeleton Connection。
- 躯干闭环:肩膀 -> 肩膀 -> 胯部 -> 胯部 -> 肩膀,形成稳定的核心躯干矩形。这是判断人体正侧面旋转的关键。
- 肢体角度计算:通过向量 BA⃗\vec{BA}BA (大腿) 与 BC⃗\vec{BC}BC (小腿) 的点积,可以实时计算膝关节张角 θ=arccos(BA⃗⋅BC⃗∣BA⃗∣∣BC⃗∣)\theta = \arccos(\frac{\vec{BA} \cdot \vec{BC}}{|\vec{BA}||\vec{BC}|})θ=arccos(∣BA∣∣BC∣BA⋅BC),这是实现健身动作识别(如深蹲、开合跳)的数学基础。
二、 架构深度拆解:API 23 的人体感知管线
在 HarmonyOS 6.1 中,人体跟踪的开发范式遵循 Session -> Frame -> Body -> Landmarks 的异步响应式结构。
2.1 会话配置:ARType.BODY 的深度定制
在 API 23 中,开启人体感知需要显式配置 ARType.BODY。值得注意的是,maxDetectedBodyNum 参数决定了 NPU 的负载,单人模式下性能最优。
// 【轻口味 Demo】配置人体跟踪会话
viewContext.config = {
type: arEngine.ARType.BODY, // 开启人体感知模式
maxDetectedBodyNum: 1, // 设置追踪人数(1或2)
planeFindingMode: arEngine.ARPlaneFindingMode.DISABLED, // 禁用平面检测以优化功耗
powerMode: arEngine.ARPowerMode.NORMAL, // 在精度与发热间取得平衡
focusMode: arEngine.ARFocusMode.AUTO, // 保持画面锐利
};
2.2 坐标映射与显示矫正
AR Engine 输出的骨骼点坐标 ARBodyLandmark2D 是 归一化坐标 (Normalized Coordinates),其范围在 [0,1][0, 1][0,1] 之间。
- 坐标转换公式:Xpixel=Xnorm×WidthdisplayX_{pixel} = X_{norm} \times Width_{display}Xpixel=Xnorm×Widthdisplay,但必须考虑预览流(通常是 4:3)与 UI 容器(通常是全屏)之间的 Aspect Ratio 适配。
- 深度建议:使用
RelativeContainer配合px2vp转换函数,确保在不同分辨率(Mate 60 vs MatePad)下骨架线段不发生拉伸变形。
三、 API 参考:ArkTS 与 Native 接口深度解析
为了实现企业级的鲁棒性,开发者必须理解感知管线中每一个核心接口的物理意义。
3.1 ArkTS 核心接口详解
在 ArkTS 侧,HarmonyOS主要通过响应式回调获取结构化数据。
-
arViewController.ARViewContext:init(): 异步初始化方法。它是整个 AR 会话的“总闸”,只有在返回Promise<void>成功后,底层的相机流和感知线程才会真正就绪。config: 这是一个包含多种模式的配置对象。对于人体跟踪,必须设置type: arEngine.ARType.BODY。
-
ARFrame.acquireBodySkeleton():- 功能:从当前时间戳的帧数据中提取所有被追踪的人体对象。
- 返回值:
arEngine.ARBody[]数组。如果视野内没人,则返回空数组。
-
arEngine.ARBody.getLandmarks2D():- 语义:返回当前人体对象的 20 个关键点。
- 结构:每个元素包含
x,y(归一化坐标) 和type(骨骼点类型索引)。
3.2 Native (C++) 关键接口详解
对于高性能需求场景,NDK 提供了更底层的指针级操作。
-
HMS_AREngine_ARBody_GetSkeletonPointData2D:- 原型:
void HMS_AREngine_ARBody_GetSkeletonPointData2D(const AREngine_ARSession *session, const AREngine_ARBody *arBody, const float **skeletonPoints2D)。 - 深度解析:通过传入一个二级指针,直接获取底层算法输出的原始数据地址。这种 0 拷贝(Zero-Copy) 机制避免了大数据量在 JS 引擎与 C++ 引擎之间的频繁搬运,是实现 120Hz 极速反馈的关键。
- 原型:
-
HMS_AREngine_ARBody_GetSkeletonConfidence:- 作用:获取每个骨骼点的置信度。
- 实战意义:在人体发生重叠或部分出屏时,置信度会显著下降。建议设置阈值(如 0.6),低于该值的点应在渲染时置为透明,否则会出现骨架“瞬间飞出”的视觉 Bug。
-
HMS_AREngine_ARBody_GetSkeletonConnection:- 功能:获取骨骼点之间的链接关系索引。
- 优势:官方定义的拓扑结构会自动适配不同的人体姿态,开发者无需手动硬编码“肩膀连脖子”这类逻辑,直接遍历链接数组即可绘制完整骨架。
-
HMS_AREngine_ARConfig_SetBodyDetectedNum:- 调优策略:在“单人体感”App 中,务必将此值显式设为
1。这能让 NPU 聚焦于单一目标的特征提取,显著提升边缘检测的稳定性并降低发热。
- 调优策略:在“单人体感”App 中,务必将此值显式设为
四、 项目实战:构建“Harmony Fit”体感深蹲计数器
接下来我们将实现一个具体的案例场景:通过监测人体膝盖张角,自动计算深蹲次数并提供实时视觉反馈。
3.1 核心业务逻辑:动作识别算法
动作识别的核心在于维护一个简单的有限状态机(FSM):
- State 0 (Standing): 膝盖角度 > 160°。
- State 1 (Squatting): 膝盖角度 < 100°。
- 触发条件: 从 State 0 进入 State 1 再回到 State 0,计为一次成功深蹲。
/**
* @filename SquatCounter.ets
* 基于 20 骨骼点实现的深蹲计数引擎
*/
class SquatCounter {
private isSquatting: boolean = false;
private count: number = 0;
private thresholdDown: number = 100; // 下蹲判定角度
private thresholdUp: number = 160; // 站立判定角度
// 计算三点构成的夹角(角度制)
calculateAngle(p1: arEngine.ARBodyLandmark2D, p2: arEngine.ARBodyLandmark2D, p3: arEngine.ARBodyLandmark2D): number {
const v1 = { x: p1.x - p2.x, y: p1.y - p2.y };
const v2 = { x: p3.x - p2.x, y: p3.y - p2.y };
const dotProduct = v1.x * v2.x + v1.y * v2.y;
const mag1 = Math.sqrt(v1.x * v1.x + v1.y * v1.y);
const mag2 = Math.sqrt(v2.x * v2.x + v2.y * v2.y);
const angle = Math.acos(dotProduct / (mag1 * mag2)) * (180 / Math.PI);
return angle;
}
process(landmarks: Map<arEngine.ARBodyLandmarkType, arEngine.ARBodyLandmark2D>): number {
if (landmarks.has(arEngine.ARBodyLandmarkType.LEFT_HIP) &&
landmarks.has(arEngine.ARBodyLandmarkType.LEFT_KNEE) &&
landmarks.has(arEngine.ARBodyLandmarkType.LEFT_ANKLE)) {
const kneeAngle = this.calculateAngle(
landmarks.get(arEngine.ARBodyLandmarkType.LEFT_HIP)!,
landmarks.get(arEngine.ARBodyLandmarkType.LEFT_KNEE)!,
landmarks.get(arEngine.ARBodyLandmarkType.LEFT_ANKLE)!
);
// 状态机切换逻辑
if (!this.isSquatting && kneeAngle < this.thresholdDown) {
this.isSquatting = true;
console.info('[轻口味 Demo]', '检测到下蹲动作');
} else if (this.isSquatting && kneeAngle > this.thresholdUp) {
this.isSquatting = false;
this.count++;
console.info('[轻口味 Demo]', `深蹲完成!当前次数: ${this.count}`);
}
}
return this.count;
}
}
3.2 界面实现:响应式骨架与实时计数
利用 Shape 渲染器实现高性能的骨架跟随效果。
@Component
struct ARBodyMirror {
@State bodyInfos: BodyInfo[] = [];
@State squatCount: number = 0;
private counter: SquatCounter = new SquatCounter();
// 帧更新回调:数据驱动渲染
private onFrameUpdate(bodies: arEngine.ARBody[]) {
this.bodyInfos = bodies.map(b => {
const landmarks = b.getLandmarks2D();
const map = arLandmarksToMap(landmarks);
// 更新计数逻辑
this.squatCount = this.counter.process(map);
return { trackId: b.trackId, landmarks: landmarks };
});
}
build() {
Stack() {
// 1. AR 底座
ARView({ context: this.arContext }).width('100%').height('100%')
// 2. 矢量骨架层
Shape() {
ForEach(this.bodyInfos, (info: BodyInfo) => {
this.drawBones(arLandmarksToMap(info.landmarks))
})
}.width('100%').height('100%')
// 3. 计数看板
Column() {
Text(`今日深蹲: ${this.squatCount}`)
.fontSize(48)
.fontColor(Color.White)
.fontWeight(FontWeight.Bold)
.textShadow({ radius: 10, color: Color.Black })
Text('请保持全身在相机视野内')
.fontSize(16)
.fontColor('#CCFFFFFF')
}
.margin({ top: 100 })
}
}
}
3.3 运行效果
示例中如果没有识别到人体则红色提醒“未检测到人体”: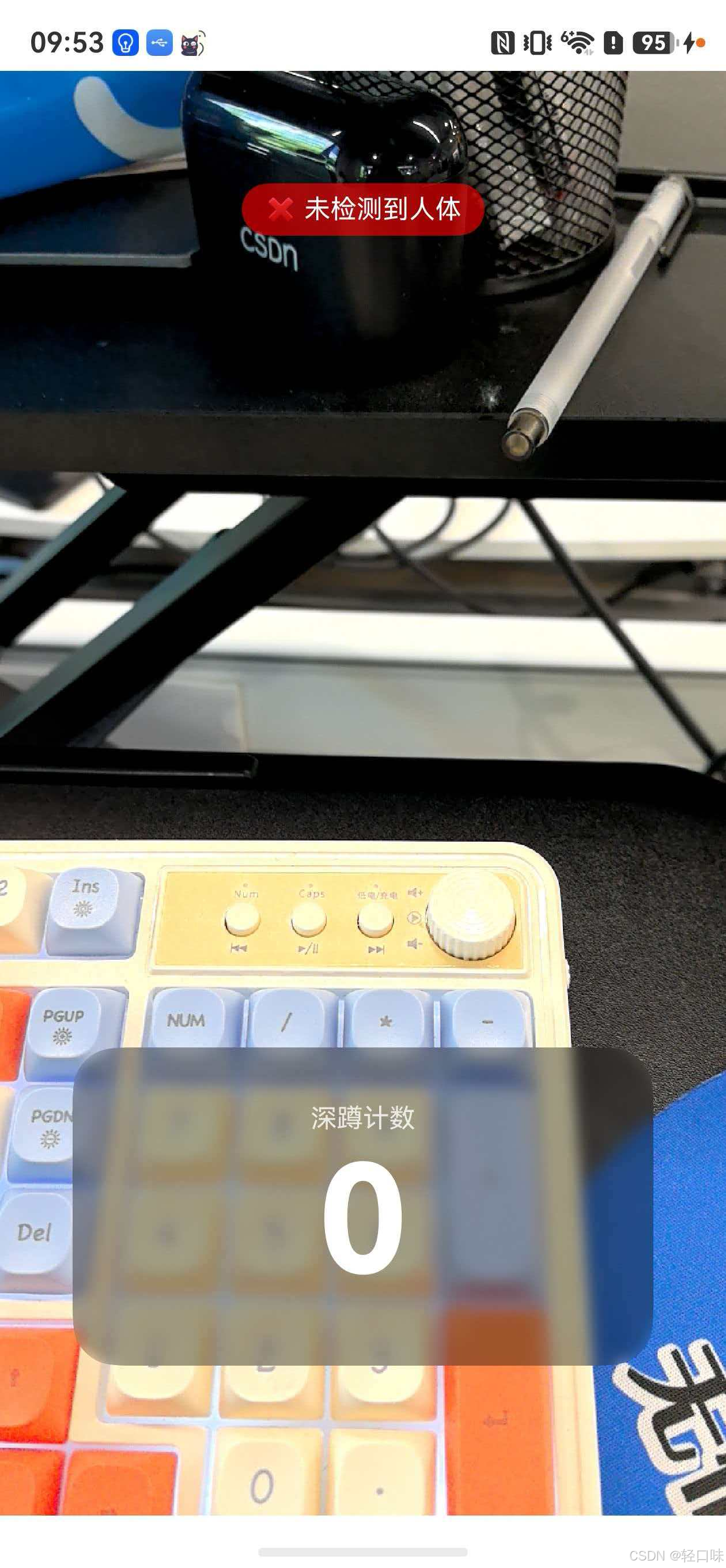
识别到人体或动作后进行正常的深蹲计数,并且顶部绿色框标识“追踪中”: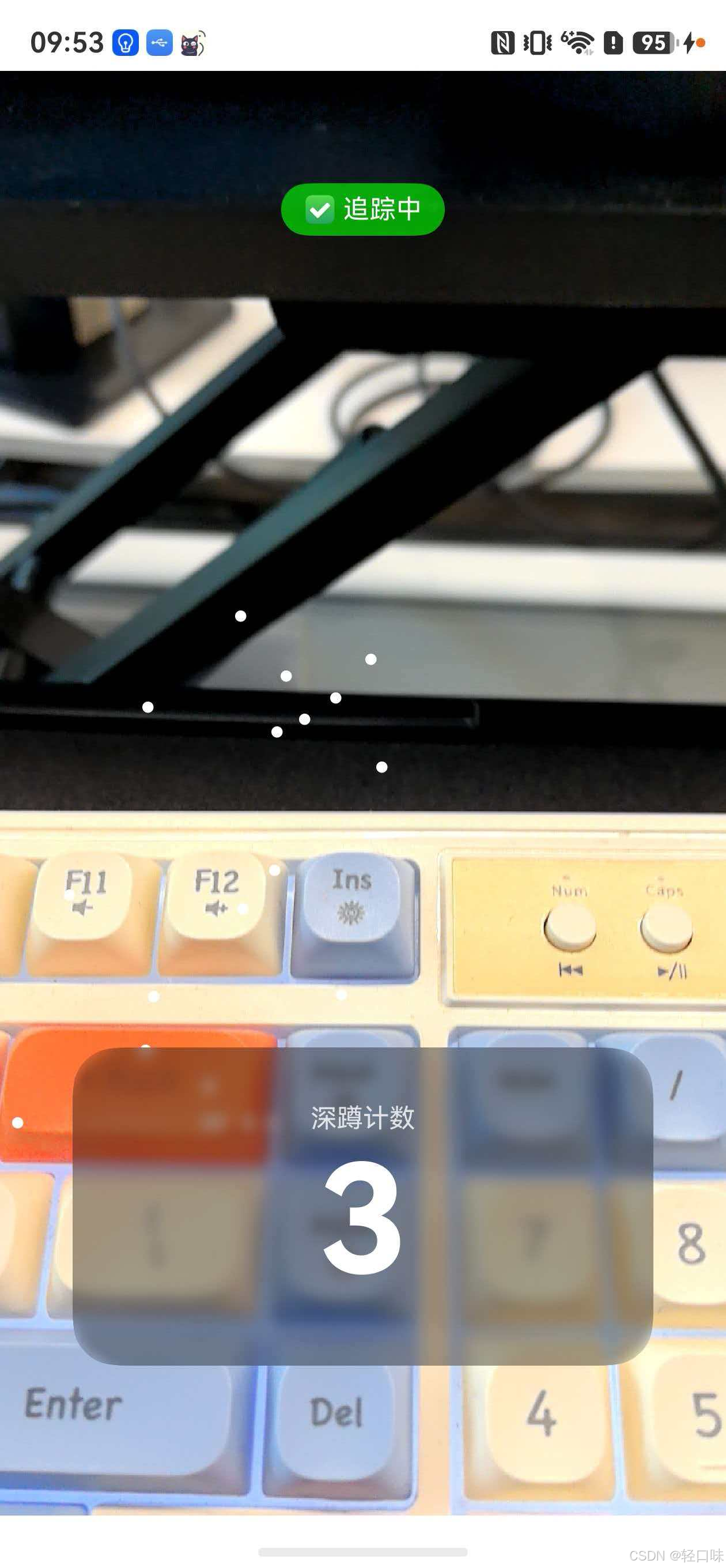
五、 Native 进阶:性能瓶颈与 NDK 优化
在 120Hz 刷新率的旗舰机型上,ArkTS 层的数据同步可能会成为瓶颈。
4.1 0 拷贝数据访问
使用 HMS_AREngine_ARBody_GetSkeletonPointData2D 接口可以绕过 JS 序列化开销,直接在 Native 层进行动作识别计算。
// Native 层高性能处理
const float *skeletonPoints2D = nullptr;
HMS_AREngine_ARBody_GetSkeletonPointData2D(arSession, arBody, &skeletonPoints2D);
// 获取置信度:过滤遮挡产生的抖动点
const float *confidences = nullptr;
HMS_AREngine_ARBody_GetSkeletonConfidence(arSession, arBody, &confidences);
for (int j = 0; j < 20; j++) {
if (confidences[j] < 0.6) continue; // 剔除不可信的点
// ... 执行 Native 向量计算
}
4.2 功耗与热管理
人体跟踪涉及复杂的神经网络推理。建议在不需要高频刷新的非交互阶段,通过 arContext.pause() 暂停会话,或动态调整 HMS_AREngine_ARConfig_SetBodyDetectedNum 限制检测人数,以降低 SoC 功耗。
六、 总结
人体骨骼识别是 AR Engine 从“静态视觉”迈向“交互行为”的关键一步。
- 感知精度:20 个骨骼点提供了足以支撑专业健身与舞蹈应用的动力学数据。
- 开发效率:ArkTS 声明式语法结合
ARView组件,极大降低了 3D 场景与相机流融合的门槛。 - 性能深度:NDK 接口为开发者预留了极致优化的空间,支持 0 拷贝访问骨骼 Buffer。
通过本文的“Harmony Fit”实战,我们不仅掌握了接口调用,更深入理解了基于角度变化的动作状态机模型。在未来的全栈开发中,这种体感交互能力将为教育、健康及办公应用带来全新的想象空间。

讨论HarmonyOS开发技术,专注于API与组件、DevEco Studio、测试、元服务和应用上架分发等。
更多推荐


 3
3 0
0- 0



 已为社区贡献78条内容
已为社区贡献78条内容

所有评论(0)