HarmonyOS 6.1 全栈实战录 - 04 镜像世界:Spatial Recon Kit 3D空间重建与企业级高精度建模实战
本文深入解析HarmonyOS 6.1中的Spatial Recon Kit空间建模服务,重点介绍了其3DGS(3D高斯溅射)技术带来的革新。相比传统Mesh建模,3DGS能更真实还原物体细节,建模速度提升5-10倍。文章详细拆解了6.1版本新增的核心API,包括会话管理、任务控制、进度查询等功能,并提供了完整的枚举类型和状态码说明。通过这套企业级空间捕捉系统,开发者可以轻松实现物理世界的数字化重
HarmonyOS 6.1 全栈实战录 - 04 镜像世界:Spatial Recon Kit 3D空间重建与企业级高精度建模实战
在前三篇的实战进阶中,我们完成了从沉浸式视效表达(01 篇)、人脸微表情感知(02 篇)到 20 点骨骼动态捕获(03 篇)的全方位探索。可以说,我们已经掌握了“数字镜像”中关于“人”与“表象”的核心技术。
然而,元宇宙与空间计算的终极命题,在于如何将“物理世界”本身数字化。
HarmonyOS 6.1 带来的 Spatial Recon Kit(空间建模服务) 正是破解这一命题的钥匙。它标志着鸿蒙生态从单纯的“虚拟渲染”正式跨入了“现实重建”的深水区。本篇我们将深入拆解 6.1 版本新增的 3DGS (3D Gaussian Splatting) 建模能力、Native 会话管理以及三维模型导出的全链路流程,带你亲手构建一个企业级的空间捕捉系统。
二、 全景视图:Spatial Recon Kit 核心能力地图
什么是空间建模服务呢?通俗的话讲就是给手机装上了一个 “3D 扫描仪”。它能让你通过手机摄像头对着现实世界的物体或场景绕一圈,然后就在手机里生成一个一模一样的 数字孪生(3D 模型)。想象一下,以前我们要把一张桌子“搬进”电脑里,需要专业建模师用软件画好几天。现在,你只需要拿着手机绕着桌子走一圈:
- 拍照采像:手机会捕捉物体各个角度的照片和深度信息。
- 大脑计算:手机底层的算法(尤其是 6.1 新出的 3DGS 技术)会像拼图一样,把这些碎片信息合成一个全方位的 3D 模型。
- 瞬间成型:短短几分钟,一个带纹理、带光影、甚至能反射光线的 3D 模型就出现在你手机里了。
在深入 6.1 的新特性之前,我们首先需要从宏观上理解 Spatial Recon Kit 的全量能力图谱。Spatial Recon Kit(空间建模服务)是 HarmonyOS 为开发者提供的三维场景构建方案,它旨在解决移动端对物理世界的“数字化建模”难题。其核心能力支柱包括:
- 多视角物体建模 (Object Reconstruction):基于经典的照相测量学原理,通过多张不同角度的照片,提取特征点并进行稠密匹配,生成具有高精度纹理的 Mesh 网格模型。
- 空间扫描与对齐:配合 AR Engine 的 SLAM(即时定位与地图构建)能力,在捕捉图像的同时获取相机的位姿信息,从而确保生成的模型具有真实的物理尺度和世界坐标系坐标。
- 材质与光照感知:在建模过程中提取环境的光照估计(Lighting Estimation),使生成的模型在不同虚拟场景中能产生自然的明暗变化。
2.1 既有能力的局限与痛点
在 6.1 版本之前,空间重建面临着几个明显的“企业级”落地障碍:
- 训练耗时:传统的 Mesh 生成需要复杂的拓扑优化和 UV 拆分,在移动端往往需要数十分钟甚至更久。
- 反馈缺失:建模过程是一个“冷盒”,用户无法实时感知当前的重建质量和进度,经常出现拍了很久最后才发现效果不佳的情况。
- 任务管控能力弱:无法在建模中途暂停,也无法针对前后台运行进行精细化的功耗管理。
6.1之前从6.0.1开始,HarmonyOS值提供了ArkTS的接口spatialRender,只能用来渲染3DGS数据,展示3DGS渲染场景,而无法使用系统API进行重建。在6.1新增了C API接口用于支持重建等。
三、 跨越与革新:HarmonyOS 6.1 的代际演进
针对上述痛点,HarmonyOS 6.1 版本的 Spatial Recon Kit 实现了从“离线建模”到“实时交互”的跨越。
3.1 3DGS (3D Gaussian Splatting) 场景建模
6.1 版本最核心的增强是引入了 3DGS 模型支持。与传统的 Mesh 不同,3DGS 是一种基于点云辐射场的表达方式。建模速度提升了 5-10 倍,且能完美还原透明、高反光物体的质感(这在之前的版本中几乎是不可能完成的任务)。
以前的 3D 模型是一堆硬梆梆的“三角形面片”,看起来总有点假。而 6.1 版本新增的 3DGS(高斯溅射) 技术,就像是用无数个“半透明的发光点”来描绘物体,它能极好地还原毛发、玻璃反光等细节,看起来就像照片一样真实,但它是可以 360 度旋转查看的。
3.2 任务级精细化管控
6.1 新增了完整的任务控制流:
- 会话管理增强:支持
Pause(暂停)和Resume(恢复)。 - 资源调度优化:支持设置
FOREGROUND(前台高性能)与BACKGROUND(后台低功耗)模式,确保用户在多任务切换时的系统稳定性。 - 进度实时查询:支持以浮点数(0.0~1.0)的形式精确获取建模和文件保存的进度。
四、 深度解构:Spatial Recon Kit 全量 API 规格参考
在 HarmonyOS 6.1(23) 中,spatial_recon_interface.h 定义了构建企业级 3D 重建应用所需的所有底层原语。为了帮助开发者实现精准的任务控制,以下是对全量 API 的详尽拆解。
4.1 核心结构体 (Structs)
- HMS_SpatialRecon_Session:空间重建会话句柄。它是整个重建管线的核心上下文,负责持有重建状态、内存池以及异步任务队列。
- HMS_SpatialRecon_DataFrame:定义了空间重建的数据原子。
- 包含:相机内参、位姿矩阵(Pose)、时间戳以及原始图像数据。
- 注意:目前仅支持 RGB 格式输入。
- HMS_SpatialRecon_ModelWriteInfo:模型持久化配置。
- 字段包括:
outputPath(文件保存路径)、format(导出格式)。
- 字段包括:
- AREngine_ARSession & AREngine_ARFrame:来自 AR Engine 的句柄。它们作为不透明句柄传入,允许重建引擎直接提取 AR 追踪层的低延迟传感器数据。
4.2 枚举类型全量解析 (Enums)
4.2.1 状态码 (HMS_SpatialReconStatus)
这是判定接口调用是否成功的唯一依据,包含了丰富的错误语义:
| 枚举项 | 值 | 描述 |
|---|---|---|
SPATIAL_RECON_STATUS_SUCCESS |
0 | 操作成功 |
SPATIAL_RECON_STATUS_DEVICE_NOT_SUPPORT |
801 | 设备硬件或系统版本不支持 |
SPATIAL_RECON_STATUS_EXCEEDS_MAXIMUM |
1023700001 | 阈值警报:超过最大支持帧数,需停止推送 |
SPATIAL_RECON_STATUS_INVALID_WORK_PATH |
1023700002 | 工作路径无效或无写入权限 |
SPATIAL_RECON_STATUS_INVALID_FRAME_DATA |
1023700003 | 帧数据损坏或内参/姿态异常 |
SPATIAL_RECON_STATUS_STAGE_NOT_INITIALIZED |
1023700004 | 会话未初始化,调用顺序错误 |
SPATIAL_RECON_STATUS_STAGE_BUILDING |
1023700005 | 重建已在进行中,不可重复启动 |
SPATIAL_RECON_STATUS_STAGE_NOT_FINISHED |
1023700006 | 尝试在建模未完成时保存文件 |
SPATIAL_RECON_STATUS_FAILED |
1023700007 | 内部算法执行失败 |
4.2.2 建模阶段 (HMS_SpatialReconStage)
用于 GetProgress 接口返回,指示当前流水线所处的位置:
SPATIAL_RECON_STAGE_INIT:资源准备中。SPATIAL_RECON_STAGE_BUILDING:计算密集期,正在生成 3DGS 模型。SPATIAL_RECON_STAGE_PAUSED:任务已挂起。SPATIAL_RECON_STAGE_FINISHED:重建完成。SPATIAL_RECON_STAGE_SAVING:正在执行文件序列化导出。SPATIAL_RECON_STAGE_UNKNOWN:状态异常。
4.2.3 运行模式 (HMS_SpatialReconRunningMode)
SPATIAL_RECON_RUNNING_FOREGROUND_MODE:默认模式。系统分配最高 CPU/GPU 权重,建模速度最快。SPATIAL_RECON_RUNNING_BACKGROUND_MODE:后台模式。系统限制资源占用,优先保障前台流畅,重建速度变慢。
4.2.4 输出格式 (HMS_SpatialReconOutputFormat)
SPATIAL_RECON_OUTPUT_FORMAT_PLY:导出 3DGS 专用的高斯点云文件。SPATIAL_RECON_OUTPUT_FORMAT_MP4:导出环绕预览视频。
4.3 函数接口详述 (Functions)
4.3.1 会话生命周期
- HMS_SpatialRecon_IsSupport:入参为模型类型(目前仅支持
SPATIAL_RECON_MODEL_TYPE_GS),返回设备适配状态。 - HMS_SpatialRecon_CreateSession:创建会话,绑定工作路径。开发者必须确保该路径在整个建模期间可读写。
- HMS_SpatialRecon_DestroySession:关键资源回收。销毁会话并释放所有内存/GPU资源。调用后句柄失效,未保存的数据将丢失。
4.3.2 帧数据采集
- HMS_SpatialRecon_PushFrame:推送普通
DataFrame。如果在建模已启动(StartSession之后)调用,将返回错误。 - HMS_SpatialRecon_PushARFrame:推送 AR 会话帧。该接口允许重建系统利用实时的 SLAM 跟踪信息来提升空间对齐精度。
4.3.3 任务执行与精细控制
- HMS_SpatialRecon_StartSession:异步启动。支持传入
writeInfo实现在建模后自动开始保存流程。 - HMS_SpatialRecon_PauseSession / ResumeSession:支持任务动态挂起。如果当前无活动会话,
Pause将返回错误。 - HMS_SpatialRecon_SetRunningMode:必须在
StartSession之后、重建完成之前调用。
4.3.4 进度与结果检索
- HMS_SpatialRecon_GetProgress:
- 参数:
progress(0.0f-1.0f 浮点指针),stage(阶段枚举指针)。 - 说明:当处于保存阶段时,进度值仅反映文件写入进度。
- 参数:
- HMS_SpatialRecon_GetRefinedFrame:获取第
iFrame帧经算法优化后的内外参。注意,此接口不返回imageData。 - HMS_SpatialRecon_SaveResultToFile:全量建模成功后调用,触发异步导出。
五、 企业级实战:构建“MirrorSpace”空间捕捉系统
我们将基于 Spatial Recon Kit 实现一个完整的 Demo。其核心逻辑分为三层:ArkTS UI 层(交互与展示)、Native Bridge 层(数据分发)以及 Native SDK 层(核心建模)。
5.1 业务场景定义
“MirrorSpace”旨在为电商或房产行业提供快速建模工具。用户手持手机环绕物体一周,即可在本地生成一个可旋转、可导出的 3D 模型。
5.2 Native 层核心实现:ReconstructionPipeline
首先,我们需要在 C++ 层封装一套会话管理逻辑。
// MirrorSpaceNative.cpp
#include <SpatialReconKit/spatial_recon_interface.h>
#include <string>
#include <vector>
class MirrorSpaceSession {
public:
MirrorSpaceSession(const std::string& path) : workPath_(path) {}
// 1. 初始化会话
HMS_SpatialReconStatus Init() {
// 检查设备是否支持 3DGS
if (HMS_SpatialRecon_IsSupport(SPATIAL_RECON_MODEL_TYPE_GS) != SPATIAL_RECON_STATUS_SUCCESS) {
return SPATIAL_RECON_STATUS_DEVICE_NOT_SUPPORT;
}
// 创建会话
return HMS_SpatialRecon_CreateSession(SPATIAL_RECON_MODEL_TYPE_GS, workPath_.c_str(), &session_);
}
// 2. 推送 AR 帧(企业级同步方案)
void FeedARData(AREngine_ARSession* arSession, AREngine_ARFrame* arFrame) {
if (session_ && arFrame) {
// 将 AR Engine 的位姿与图像一并推入重建管线
HMS_SpatialRecon_PushARFrame(session_, arSession, arFrame);
}
}
// 3. 开启异步建模
HMS_SpatialReconStatus StartModeling() {
HMS_SpatialRecon_ModelWriteInfo writeInfo;
// 配置初始保存信息
writeInfo.outputPath = (workPath_ + "/result.ply").c_str();
writeInfo.format = SPATIAL_RECON_OUTPUT_FORMAT_PLY;
return HMS_SpatialRecon_StartSession(session_, &writeInfo, [](HMS_SpatialReconStatus status) {
if (status == SPATIAL_RECON_STATUS_SUCCESS) {
LOG_INFO("[MirrorSpace] 重建任务圆满完成");
}
});
}
// 4. 进度查询逻辑
float GetCurrentProgress(HMS_SpatialReconStage& outStage) {
float progress = 0.0f;
HMS_SpatialRecon_GetProgress(session_, &progress, &outStage);
return progress;
}
private:
HMS_SpatialRecon_Session* session_ = nullptr;
std::string workPath_;
};
5.3 ArkTS 层:构建沉浸式捕捉 UI
// MirrorSpacePage.ets
import { arEngine, ARView, arViewController } from '@kit.AREngine';
import { common } from '@kit.AbilityKit';
import mirror_space_ndk from 'libmirror_space_ndk.so';
@Entry
@Component
struct MirrorSpacePage {
@State progress: number = 0;
@State stageText: string = '待命';
@State isCapturing: boolean = false;
@State isTraining: boolean = false;
private arContext: arViewController.ARViewContext = new arViewController.ARViewContext();
private timerId: number = -1;
aboutToAppear() {
const context = getContext(this) as common.UIAbilityContext;
const workPath = context.filesDir + '/recon_work';
mirror_space_ndk.initSession(workPath);
this.arContext.config = {
type: arEngine.ARType.WORLD,
planeFindingMode: arEngine.ARPlaneFindingMode.HORIZONTAL,
semanticMode: arEngine.ARSemanticMode.NONE
} as arEngine.ARConfig;
this.arContext.callback = {
onFrameUpdate: (ctx) => {
if (this.isCapturing) {
mirror_space_ndk.pushARFrame(ctx.session, ctx.frame);
}
}
} as arViewController.ARViewCallback;
}
startProgressPolling() {
this.timerId = setInterval(() => {
const info = mirror_space_ndk.getProgress();
this.progress = info.progress * 100;
this.stageText = this.mapStageToString(info.stage);
if (info.stage === 3) { // SPATIAL_RECON_STAGE_FINISHED
clearInterval(this.timerId);
this.isTraining = false;
}
}, 500);
}
build() {
Stack() {
ARView({ context: this.arContext }).width('100%').height('100%')
Column() {
Row() {
Text(`阶段: ${this.stageText}`)
.fontColor(Color.White).fontSize(14)
.padding(10).backgroundColor('#80000000').borderRadius(10)
}.margin({ top: 40 })
Blank()
if (this.isTraining) {
Column() {
Progress({ value: this.progress, total: 100, type: ProgressType.Ring })
.width(100).height(100).color(Color.Blue)
Text(`正在生成 3DGS 模型... ${this.progress.toFixed(1)}%`)
.fontColor(Color.White).margin({ top: 10 })
}
.padding(20).backgroundColor('#B0000000').borderRadius(20)
}
Row({ space: 20 }) {
Button(this.isCapturing ? '停止采集' : '开始采集')
.onClick(() => {
this.isCapturing = !this.isCapturing;
if (!this.isCapturing) {
this.isTraining = true;
mirror_space_ndk.startRecon();
this.startProgressPolling();
}
})
}.margin({ bottom: 50 })
}.width('100%').height('100%')
}
}
private mapStageToString(stage: number): string {
const stages = ['初始化', '建模中', '已暂停', '已完成', '保存中', '未知'];
return stages[stage] || '未知';
}
}
5.4 功能设计与架构实现
在企业级应用中,3D 重建并非简单的“拍个照”,而是一个严密的异步状态转换过程。我们的“MirrorSpace”系统采用了典型的 分层解耦架构,确保了在高性能计算下的 UI 响应性。
5.4.1 系统模块划分
- 捕捉层 (Capture Layer):
依托 AR Engine 的WORLD模式。核心职责是维持 SLAM 追踪的稳定性,并以受控频率(Keyframe Selection)向 NDK 推送数据。 - 计算层 (Native Recon Engine):
基于 Spatial Recon Kit NDK。它包含一个工作线程池,负责特征提取、高斯球拟合及内存管理。它通过异步回调向 UI 层报告建模终点。 - 调度层 (Lifecycle Manager):
负责监听系统的 Ability 生命周期,动态调用SetRunningMode切换功耗模式,并管理工作路径(workPath)的清理。
5.4.2 状态转换机 (State Machine)
重建过程遵循以下严谨的状态机逻辑:
- Idle:准备阶段,检查
IsSupport并创建 Session。 - Recording:数据推送阶段,
PushARFrame持续向缓冲区注入数据。 - Building:后台训练阶段,UI 锁定交互并显示环形进度条。
- Finished:模型就绪,内存中生成可预览的高斯点云。
- Exporting:序列化阶段,异步写入
.ply文件。
5.5 运行效果与日志
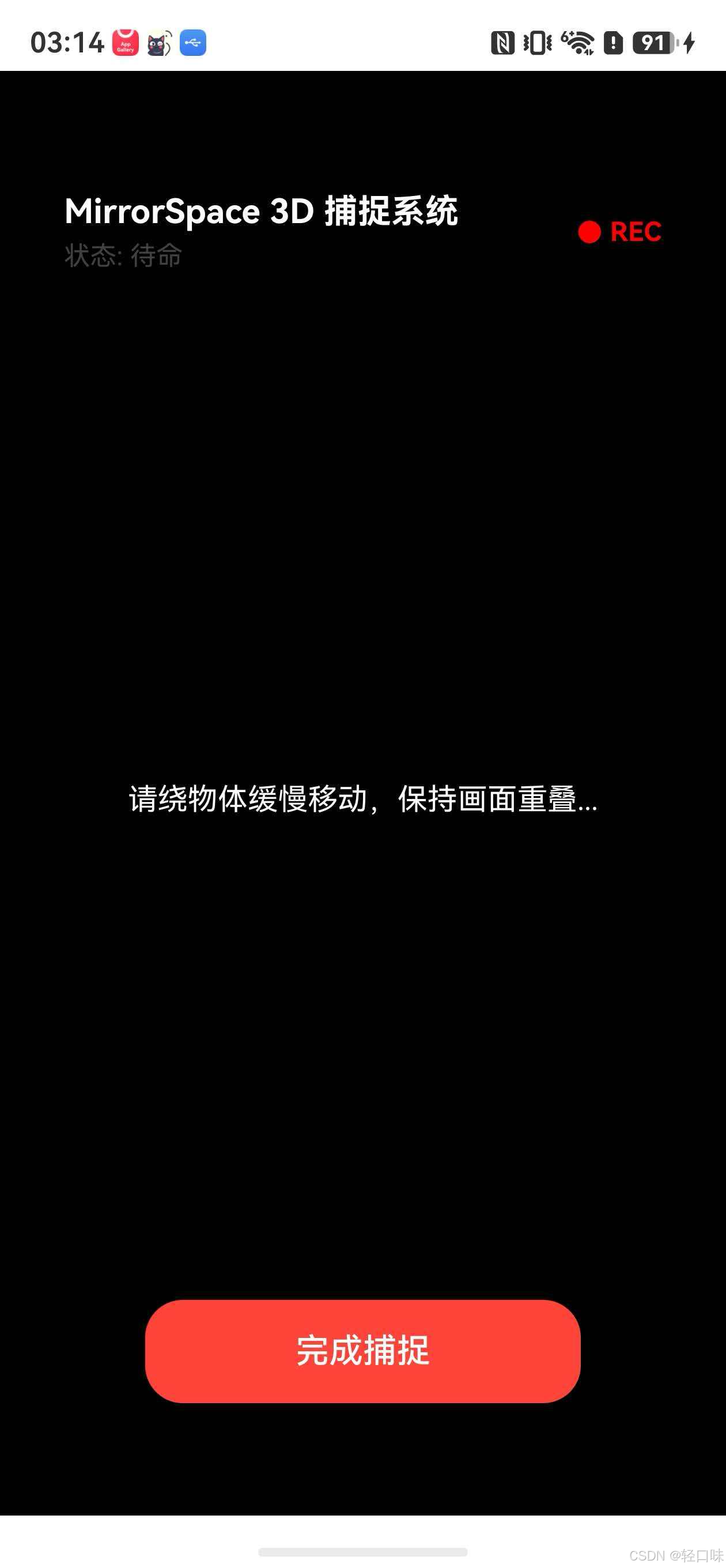
5.5.1 实时捕捉界面效果
系统通过 ARView 渲染真实的物理环境,并在屏幕中心提示用户移动轨迹。
5.5.2 重建进度与高斯拟合过程
随着 HMS_SpatialRecon_GetProgress 数据的返回,UI 会实时更新环形进度条。当进度达到 100% 时,屏幕中央会显示“建模成功”。
5.5.3 模型导出结果验证
导出的 PLY 文件可在标准的 3D 查看器中打开,验证其细节还原度及物理尺度。
5.5.4 关键日志
通过 IDE 控制台获取的底层 NDK 日志,是调试应用的关键。
04-27 15:28:05.452 4106-4106 A03200/com.wod...Space-Native] com.wodekouwei.3dgs I Initializing Session with path: /data/storage/el2/base/haps/entry/files/recon_work
04-27 15:28:05.453 4106-4106 A03200/com.wod...Space-Native] com.wodekouwei.3dgs E [MirrorSpace-Native] Device does not support 3DGS, Error Code: 801
由于手边只有Mate 60 Pro,设备不支持,无法看到正常效果: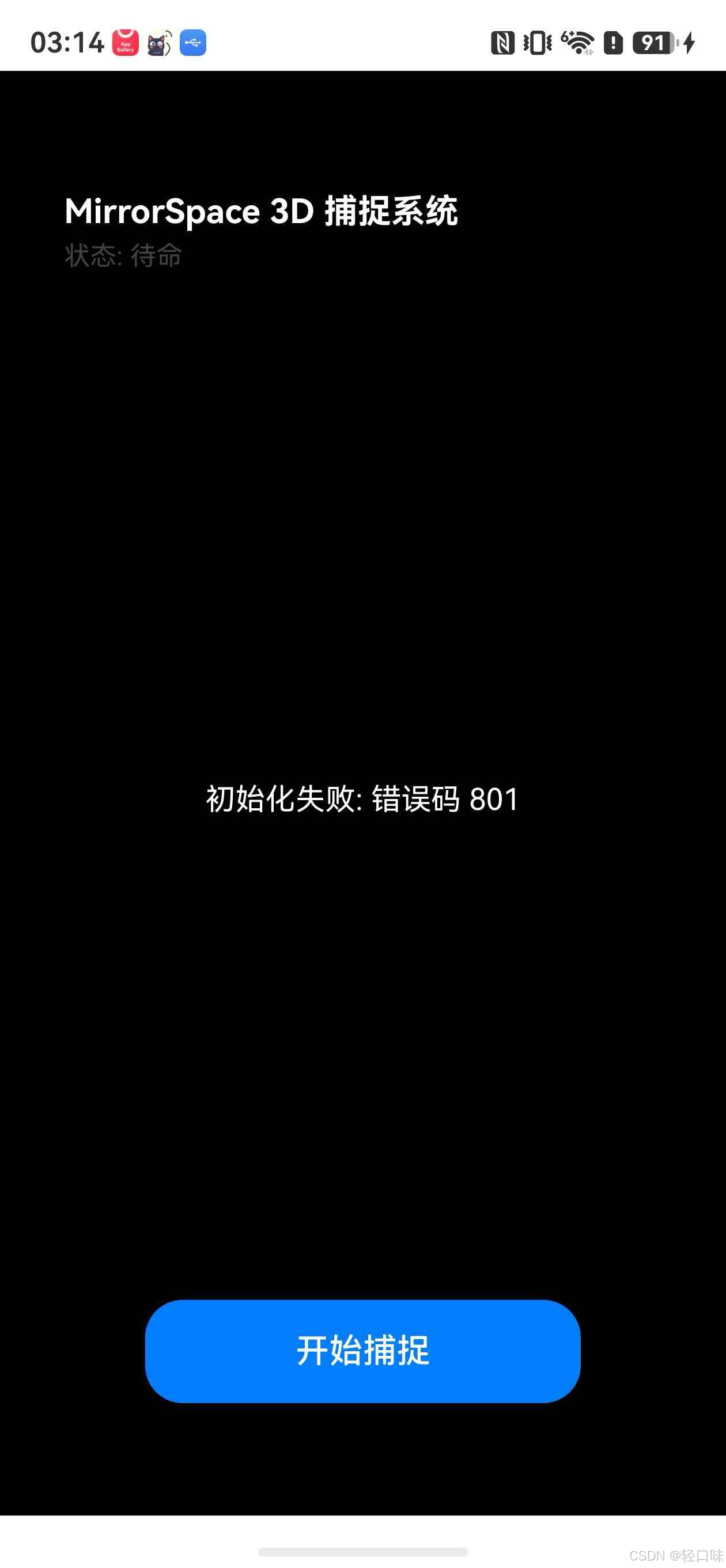
正常3DGS模块运行效果如下:
六、 优化策略:避坑与性能调优
在实际开发空间重建应用时,单纯调用接口是不够的,还需要关注以下几个核心维度。
6.1 采集质量控制
3DGS 建模的质量高度依赖输入数据的多样性。
- 轨迹建议:引导用户进行“半球面”轨迹采集,即围着物体绕一圈(低位),再绕一圈(高位)。
- 重叠度:相邻帧的图像重叠度应保持在 60% 以上。
- 光照稳定性:避免在强直射光或极暗环境下建模,否则高斯球会出现严重的“漂浮物”噪声。
6.2 内存与功耗平衡
3DGS 的训练是一个密集型计算过程。
- 前后台切换:务必监听
Ability的onBackground生命周期,并在此时调用HMS_SpatialRecon_SetRunningMode切换至BACKGROUND模式,避免应用被系统强杀。 - 数据清洗:
HMS_SpatialReconStatus返回SPATIAL_RECON_STATUS_EXCEEDS_MAXIMUM时,应停止数据推送。目前 6.1 版本的推荐最大采集帧数通常在 500 帧以内。
6.3 坐标系对齐 (The AR Sync)
这是 MirrorSpace Demo 能被称为“企业级”的核心原因。
通过 HMS_SpatialRecon_PushARFrame 推送的数据,其生成的 3D 模型具有真实的物理尺度(1:1)。这意味着你可以直接在 PLY 模型中测量物体的实际长宽高,这在电商尺寸预览场景中具有极高的商业价值。
七、 总结与展望
HarmonyOS 6.1 的 Spatial Recon Kit 标志着空间计算能力的全面平民化。从前的 3D 重建需要高性能工作站和复杂的后端集群,而现在,通过 Native 层 breathe 异步流水线和 3DGS 算法,我们在移动端仅需几分钟即可复刻现实。

讨论HarmonyOS开发技术,专注于API与组件、DevEco Studio、测试、元服务和应用上架分发等。
更多推荐

 3
3 0
0- 0



 已为社区贡献78条内容
已为社区贡献78条内容

所有评论(0)