鸿蒙内核源码分析(信号消费篇) | 谁让CPU连续四次换栈运行
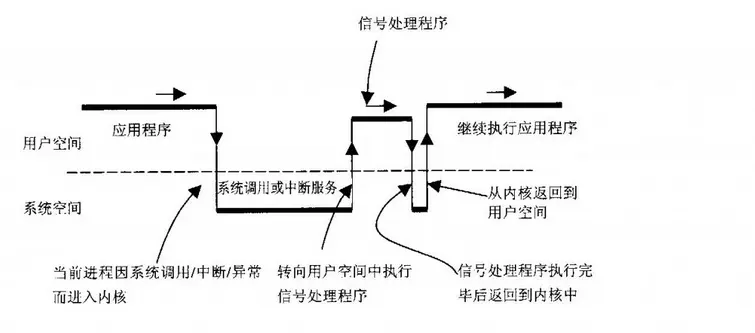
本篇有相当的难度,涉及用户栈和内核栈的两轮切换,CPU四次换栈,寄存器改值,将围绕下图来说明.
解读
- 为本篇理解方便,把图做简化标签说明:
- user:用户空间
- kernel:内核空间
- source(…):源函数
- sighandle(…):信号处理函数,
- syscall(…):系统调用,参数为系统调用号,如sigreturn,N(表任意)
- user.source():表示在用户空间运行的源函数
- 系列篇已多次说过,用户态的任务有两个运行栈,一个是用户栈,一个是内核栈.栈空间分别来自用户空间和内核空间.两种空间是有严格的地址划分的,通过虚拟地址的大小就能判断出是用户空间还是内核空间.系统调用本质上是软中断,它使CPU执行指令的场地由用户栈变成内核栈.怎么变的并不复杂,就是改变(sp和cpsr寄存器的值).sp指向哪个栈就代表在哪个栈运行, 当cpu在用户栈运行时是不能访问内核空间的,但内核态任务可以访问整个空间,而且内核态任务没有用户栈.
- 理解了上面的说明,再来说下正常系统调用流程是这样的: user.source() -> kernel.syscall(N) - > user.source() ,想要回到user.source()继续运行,就必须保存用户栈现场各寄存器的值.这些值保存在内核栈中,恢复也是从内核栈恢复.
- 信号消费的过程的上图可简化表示为: user.source() -> kernel.syscall(N) ->user.sighandle() ->kernel.syscall(sigreturn) -> user.source() 在原本要回到user.source()的中间插入了信号处理函数的调用. 这正是本篇要通过代码来说清楚的核心问题.
- 顺着这个思路可以推到以下几点,实际也是这么做的:
- kernel.syscall(N) 中必须要再次保存user.source()的上下文
sig_switch_context,为何已经保存了一次还要再保存一次? - 因为第一次是保存在内核栈中,而内核栈这部分数据会因回到用户态user.sighandle()运行而被恢复现场出栈了.保存现场/恢复现场是成双出队的好基友,注意有些文章说会把整个内核栈清空,这是不对的.
- 第二次保存在任务结构体中,任务来源于任务池,是内核全局变量,常驻内存的.两次保存的都是user.source()运行时现场信息,再回顾下相关的结构体.关键是
sig_switch_context
- kernel.syscall(N) 中必须要再次保存user.source()的上下文
typedef struct {
// ...
sig_cb sig;//信号控制块,用于异步通信
} LosTaskCB;
typedef struct {//信号控制块(描述符)
sigset_t sigFlag; //不屏蔽的信号集
sigset_t sigPendFlag; //信号阻塞标签集,记录那些信号来过,任务依然阻塞的集合.即:这些信号不能唤醒任务
sigset_t sigprocmask; /* Signals that are blocked */ //任务屏蔽了哪些信号
sq_queue_t sigactionq; //信号捕捉队列
LOS_DL_LIST waitList; //等待链表,上面挂的是等待信号到来的任务, 请查找 OsTaskWait(&sigcb->waitList, timeout, TRUE) 理解
sigset_t sigwaitmask; /* Waiting for pending signals */ //任务在等待哪些信号的到来
siginfo_t sigunbinfo; /* Signal info when task unblocked */ //任务解锁时的信号信息
sig_switch_context context; //信号切换上下文, 用于保存切换现场, 比如发生系统调用时的返回,涉及同一个任务的两个栈进行切换
} sig_cb;
- 还必须要改变原有PC/R0/R1寄存器的值.想要执行user.sighandle(),PC寄存器就必须指向它,而R0,R1就是它的参数.
- 信号处理完成后须回到内核态,怎么再次陷入内核态? 答案是:
__NR_sigreturn,这也是个系统调用.回来后还原sig_switch_context,即还原user.source()被打断时SP/PC等寄存器的值,使其跳回到用户栈从user.source()的被打断处继续执行. - 有了这三个推论,再理解下面的代码就是吹灰之力了,涉及三个关键函数
OsArmA32SyscallHandle,OsSaveSignalContext,OsRestorSignalContext本篇一一解读,彻底挖透.先看信号上下文结构体sig_switch_context.
sig_switch_context
//任务中断上下文
#define TASK_IRQ_CONTEXT \
unsigned int R0; \
unsigned int R1; \
unsigned int R2; \
unsigned int R3; \
unsigned int R12; \
unsigned int USP; \
unsigned int ULR; \
unsigned int CPSR; \
unsigned int PC;
typedef struct {//信号切换上下文
TASK_IRQ_CONTEXT
unsigned int R7; //存放系统调用的ID
unsigned int count; //记录是否保存了信号上下文
} sig_switch_context;
- 保存user.source()现场的结构体,
USP,ULR代表用户栈指针和返回地址. CPSR寄存器用于设置CPU的工作模式,CPU有7种工作模式, 谈论的用户态(usr普通用户)和内核态(sys超级用户)对应的只是其中的两种.二者都共用相同的寄存器.还原它就是告诉CPU内核已切到普通用户模式运行.- 其他寄存器没有保存的原因是系统调用不会用到它们,所以不需要保存.
R7是在系统调用发生时用于记录系统调用号,在信号处理过程中,R0将获得信号编号,作为user.sighandle()的第一个参数.count记录是否保存了信号上下文
OsArmA32SyscallHandle 系统调用总入口
/* The SYSCALL ID is in R7 on entry. Parameters follow in R0..R6 */
/******************************************************************
由汇编调用,见于 los_hw_exc.s / BLX OsArmA32SyscallHandle
SYSCALL是产生系统调用时触发的信号,R7寄存器存放具体的系统调用ID,也叫系统调用号
regs:参数就是所有寄存器
注意:本函数在用户态和内核态下都可能被调用到
//MOV R0, SP @获取SP值,R0将作为OsArmA32SyscallHandle的参数
******************************************************************/
LITE_OS_SEC_TEXT UINT32 *OsArmA32SyscallHandle(UINT32 *regs)
{
UINT32 ret;
UINT8 nArgs;
UINTPTR handle;
UINT32 cmd = regs[REG_R7];//C7寄存器记录了触发了具体哪个系统调用
if (cmd >= SYS_CALL_NUM) {//系统调用的总数
PRINT_ERR("Syscall ID: error %d !!!\n", cmd);
return regs;
}
//用户进程信号处理函数完成后的系统调用 svc 119 #__NR_sigreturn
if (cmd == __NR_sigreturn) {
OsRestorSignalContext(regs);//恢复信号上下文,回到用户栈运行.
return regs;
}
handle = g_syscallHandle[cmd];//拿到系统调用的注册函数,类似 SysRead
nArgs = g_syscallNArgs[cmd / NARG_PER_BYTE]; /* 4bit per nargs */
nArgs = (cmd & 1) ? (nArgs >> NARG_BITS) : (nArgs & NARG_MASK);//获取参数个数
if ((handle == 0) || (nArgs > ARG_NUM_7)) {//系统调用必须有参数且参数不能大于8个
PRINT_ERR("Unsupport syscall ID: %d nArgs: %d\n", cmd, nArgs);
regs[REG_R0] = -ENOSYS;
return regs;
}
//regs[0-6] 记录系统调用的参数,这也是由R7寄存器保存系统调用号的原因
switch (nArgs) {//参数的个数
case ARG_NUM_0:
case ARG_NUM_1:
ret = (*(SyscallFun1)handle)(regs[REG_R0]);//执行系统调用,类似 SysUnlink(pathname);
break;
case ARG_NUM_2://如何是两个参数的系统调用,这里传三个参数也没有问题,因被调用函数不会去取用R2值
case ARG_NUM_3:
ret = (*(SyscallFun3)handle)(regs[REG_R0], regs[REG_R1], regs[REG_R2]);//类似 SysExecve(fileName, argv, envp);
break;
case ARG_NUM_4:
case ARG_NUM_5:
ret = (*(SyscallFun5)handle)(regs[REG_R0], regs[REG_R1], regs[REG_R2], regs[REG_R3],
regs[REG_R4]);
break;
default: //7个参数的情况
ret = (*(SyscallFun7)handle)(regs[REG_R0], regs[REG_R1], regs[REG_R2], regs[REG_R3],
regs[REG_R4], regs[REG_R5], regs[REG_R6]);
}
regs[REG_R0] = ret;//R0保存系统调用返回值
OsSaveSignalContext(regs);//如果有信号要处理,将改写pc,r0,r1寄存器,改变返回正常用户态路径,而先去执行信号处理程序.
/* Return the last value of curent_regs. This supports context switches on return from the exception.
* That capability is only used with the SYS_context_switch system call.
*/
return regs;//返回寄存器的值
}
解读
- 这是系统调用的总入口,所有的系统调用都要跑这里要统一处理.通过系统号(保存在R7),找到注册函数并回调.完成系统调用过程.
OsArmA32SyscallHandle总体理解起来是被信号的保存和还原两个函数给包夹了.注意要在运行过程中去理解调用两个函数的过程,对于同一个任务来说,一定是先执行OsSaveSignalContext,第二次进入OsArmA32SyscallHandle后再执行OsRestorSignalContext.- 看
OsSaveSignalContext,由它负责保存user.source() 的上下文,其中改变了sp,r0/r1寄存器值,切到信号处理函数user.sighandle()运行. - 在函数的开头,碰到系统调用号
__NR_sigreturn,直接恢复信号上下文就退出了,因为这是要切回user.source()继续运行的操作.
//用户进程信号处理函数完成后的系统调用 svc 119 #__NR_sigreturn
if (cmd == __NR_sigreturn) {
OsRestorSignalContext(regs);//恢复信号上下文,回到用户栈运行.
return regs;
}
OsSaveSignalContext 保存信号上下文
有了上面的铺垫,就不难理解这个函数的作用.
/**********************************************
产生系统调用时,也就是软中断时,保存用户栈寄存器现场信息
改写PC寄存器的值
**********************************************/
void OsSaveSignalContext(unsigned int *sp)
{
UINTPTR sigHandler;
UINT32 intSave;
LosTaskCB *task = NULL;
LosProcessCB *process = NULL;
sig_cb *sigcb = NULL;
unsigned long cpsr;
OS_RETURN_IF_VOID(sp == NULL);
cpsr = OS_SYSCALL_GET_CPSR(sp);//获取系统调用时的 CPSR值
OS_RETURN_IF_VOID(((cpsr & CPSR_MASK_MODE) != CPSR_USER_MODE));//必须工作在CPU的用户模式下,注意CPSR_USER_MODE(cpu层面)和OS_USER_MODE(系统层面)是两码事.
SCHEDULER_LOCK(intSave);//如有不明白前往 https://my.oschina.net/weharmony 翻看工作模式/信号分发/信号处理篇
task = OsCurrTaskGet();
process = OsCurrProcessGet();
sigcb = &task->sig;//获取任务的信号控制块
//1.未保存任务上下文任务
//2.任何的信号标签集不为空或者进程有信号要处理
if ((sigcb->context.count == 0) && ((sigcb->sigFlag != 0) || (process->sigShare != 0))) {
sigHandler = OsGetSigHandler();//获取信号处理函数
if (sigHandler == 0) {//信号没有注册
sigcb->sigFlag = 0;
process->sigShare = 0;
SCHEDULER_UNLOCK(intSave);
PRINT_ERR("The signal processing function for the current process pid =%d is NULL!\n", task->processID);
return;
}
/* One pthread do the share signal */
sigcb->sigFlag |= process->sigShare;//扩展任务的信号标签集
unsigned int signo = (unsigned int)FindFirstSetedBit(sigcb->sigFlag) + 1;
OsProcessExitCodeSignalSet(process, signo);//设置进程退出信号
sigcb->context.CPSR = cpsr; //保存状态寄存器
sigcb->context.PC = sp[REG_PC]; //获取被打断现场寄存器的值
sigcb->context.USP = sp[REG_SP];//用户栈顶位置,以便能从内核栈切回用户栈
sigcb->context.ULR = sp[REG_LR];//用户栈返回地址
sigcb->context.R0 = sp[REG_R0]; //系统调用的返回值
sigcb->context.R1 = sp[REG_R1];
sigcb->context.R2 = sp[REG_R2];
sigcb->context.R3 = sp[REG_R3];
sigcb->context.R7 = sp[REG_R7];//为何参数不用传R7,是因为系统调用发生时 R7始终保存的是系统调用号.
sigcb->context.R12 = sp[REG_R12];//详见 https://my.oschina.net/weharmony/blog/4967613
sp[REG_PC] = sigHandler;//指定信号执行函数,注意此处改变保存任务上下文中PC寄存器的值,恢复上下文时将执行这个函数.
sp[REG_R0] = signo; //参数1,信号ID
sp[REG_R1] = (unsigned int)(UINTPTR)(sigcb->sigunbinfo.si_value.sival_ptr); //参数2
/* sig No bits 00000100 present sig No 3, but 1<< 3 = 00001000, so signo needs minus 1 */
sigcb->sigFlag ^= 1ULL << (signo - 1);
sigcb->context.count++; //代表已保存
}
SCHEDULER_UNLOCK(intSave);
}
解读
- 先是判断执行条件,确实是有信号需要处理,有处理函数.自定义处理函数是由用户进程安装进来的,所有进程旗下的任务都共用,参数就是信号
signo,注意可不是系统调用号,有区别的.信号编号长这样.
#define SIGHUP 1 //终端挂起或者控制进程终止
#define SIGINT 2 //键盘中断(ctrl + c)
#define SIGQUIT 3 //键盘的退出键被按下
#define SIGILL 4 //非法指令
#define SIGTRAP 5 //跟踪陷阱(trace trap),启动进程,跟踪代码的执行
#define SIGABRT 6 //由abort(3)发出的退出指令
#define SIGIOT SIGABRT //abort发出的信号
#define SIGBUS 7 //总线错误
#define SIGFPE 8 //浮点异常
#define SIGKILL 9 //常用的命令 kill 9 123 | 不能被忽略、处理和阻塞
系统调用号长这样,是不是看到一些很熟悉的函数.
#define __NR_restart_syscall 0
#define __NR_exit 1
#define __NR_fork 2
#define __NR_read 3
#define __NR_write 4
#define __NR_open 5
#define __NR_close 6
#define __NR_waitpid 7
#define __NR_creat 8
#define __NR_link 9
#define __NR_unlink 10
#define __NR_execve 11
#define __NR_chdir 12
#define __NR_time 13
#define __NR_mknod 14
#define __NR_chmod 15
#define __NR_lchown 16
#define __NR_break 17
- 最后是最最最关键的代码,改变pc寄存器的值,此值一变,在
_osExceptSwiHdl中恢复上下文后,cpu跳到用户空间的代码段 user.sighandle(R0,R1) 开始执行,即执行信号处理函数.
sp[REG_PC] = sigHandler;//指定信号执行函数,注意此处改变保存任务上下文中PC寄存器的值,恢复上下文时将执行这个函数.
sp[REG_R0] = signo; //参数1,信号ID
sp[REG_R1] = (unsigned int)(UINTPTR)(sigcb->sigunbinfo.si_value.sival_ptr); //参数2
OsRestorSignalContext 恢复信号上下文
/****************************************************
恢复信号上下文,由系统调用之__NR_sigreturn产生,这是一个内部产生的系统调用.
为什么要恢复呢?
因为系统调用的执行由任务内核态完成,使用的栈也是内核栈,CPU相关寄存器记录的都是内核栈的内容,
而系统调用完成后,需返回任务的用户栈执行,这时需将CPU各寄存器回到用户态现场
所以函数的功能就变成了还原寄存器的值
****************************************************/
void OsRestorSignalContext(unsigned int *sp)
{
LosTaskCB *task = NULL; /* Do not adjust this statement */
LosProcessCB *process = NULL;
sig_cb *sigcb = NULL;
UINT32 intSave;
SCHEDULER_LOCK(intSave);
task = OsCurrTaskGet();
sigcb = &task->sig;//获取当前任务信号控制块
if (sigcb->context.count != 1) {//必须之前保存过,才能被恢复
SCHEDULER_UNLOCK(intSave);
PRINT_ERR("sig error count : %d\n", sigcb->context.count);
return;
}
process = OsCurrProcessGet();//获取当前进程
sp[REG_PC] = sigcb->context.PC;//指令寄存器
OS_SYSCALL_SET_CPSR(sp, sigcb->context.CPSR);//重置程序状态寄存器
sp[REG_SP] = sigcb->context.USP;//用户栈堆栈指针, USP指的是 用户态的堆栈,即将回到用户栈继续运行
sp[REG_LR] = sigcb->context.ULR;//返回用户栈代码执行位置
sp[REG_R0] = sigcb->context.R0;
sp[REG_R1] = sigcb->context.R1;
sp[REG_R2] = sigcb->context.R2;
sp[REG_R3] = sigcb->context.R3;
sp[REG_R7] = sigcb->context.R7;
sp[REG_R12] = sigcb->context.R12;
sigcb->context.count--; //信号上下文的数量回到减少
process->sigShare = 0; //回到用户态,信号共享清0
OsProcessExitCodeSignalClear(process);//清空进程退出码
SCHEDULER_UNLOCK(intSave);
}
解读
- 在信号处理函数完成之后,内核会触发一个
__NR_sigreturn的系统调用,又陷入内核态,回到了OsArmA32SyscallHandle. - 恢复的过程很简单,把之前保存的信号上下文恢复到内核栈sp开始位置,数据在栈中的保存顺序可查看 用栈方式篇 ,最重要的看这几句.
sp[REG_PC] = sigcb->context.PC;//指令寄存器
sp[REG_SP] = sigcb->context.USP;//用户栈堆栈指针, USP指的是 用户态的堆栈,即将回到用户栈继续运行
sp[REG_LR] = sigcb->context.ULR;//返回用户栈代码执行位置
注意这里还不是真正的切换上下文,只是改变内核栈中现有的数据.这些数据将还原给寄存器.USP和ULR指向的是用户栈的位置.一旦PC,USP,ULR从栈中弹出赋给寄存器.才真正完成了内核栈到用户栈的切换.回到了user.source()继续运行.
- 真正的切换汇编代码如下,都已添加注释,在保存和恢复上下文中夹着
OsArmA32SyscallHandle
@ Description: Software interrupt exception handler
_osExceptSwiHdl: @软中断异常处理,注意此时已在内核栈运行
@保存任务上下文(TaskContext) 开始... 一定要对照TaskContext来理解
SUB SP, SP, #(4 * 16) @先申请16个栈空间单元用于处理本次软中断
STMIA SP, {R0-R12} @TaskContext.R[GEN_REGS_NUM] STMIA从左到右执行,先放R0 .. R12
MRS R3, SPSR @读取本模式下的SPSR值
MOV R4, LR @保存回跳寄存器LR
AND R1, R3, #CPSR_MASK_MODE @ Interrupted mode 获取中断模式
CMP R1, #CPSR_USER_MODE @ User mode 是否为用户模式
BNE OsKernelSVCHandler @ Branch if not user mode 非用户模式下跳转
@ 当为用户模式时,获取SP和LR寄出去值
@ we enter from user mode, we need get the values of USER mode r13(sp) and r14(lr).
@ stmia with ^ will return the user mode registers (provided that r15 is not in the register list).
MOV R0, SP @获取SP值,R0将作为OsArmA32SyscallHandle的参数
STMFD SP!, {R3} @ Save the CPSR 入栈保存CPSR值 => TaskContext.regPSR
ADD R3, SP, #(4 * 17) @ Offset to pc/cpsr storage 跳到PC/CPSR存储位置
STMFD R3!, {R4} @ Save the CPSR and r15(pc) 保存LR寄存器 => TaskContext.PC
STMFD R3, {R13, R14}^ @ Save user mode r13(sp) and r14(lr) 从右向左 保存 => TaskContext.LR和SP
SUB SP, SP, #4 @ => TaskContext.resved
PUSH_FPU_REGS R1 @保存中断模式(用户模式)
@保存任务上下文(TaskContext) 结束
MOV FP, #0 @ Init frame pointer
CPSIE I @开中断,表明在系统调用期间可响应中断
BLX OsArmA32SyscallHandle /*交给C语言处理系统调用,参数为R0,指向TaskContext的开始位置*/
CPSID I @执行后续指令前必须先关中断
@恢复任务上下文(TaskContext) 开始
POP_FPU_REGS R1 @弹出FPU值给R1
ADD SP, SP,#4 @ 定位到保存旧SPSR值的位置
LDMFD SP!, {R3} @ Fetch the return SPSR 弹出旧SPSR值
MSR SPSR_cxsf, R3 @ Set the return mode SPSR 恢复该模式下的SPSR值
@ we are leaving to user mode, we need to restore the values of USER mode r13(sp) and r14(lr).
@ ldmia with ^ will return the user mode registers (provided that r15 is not in the register list)
LDMFD SP!, {R0-R12} @恢复R0-R12寄存器
LDMFD SP, {R13, R14}^ @ Restore user mode R13/R14 恢复用户模式的R13/R14寄存器
ADD SP, SP, #(2 * 4) @定位到保存旧PC值的位置
LDMFD SP!, {PC}^ @ Return to user 切回用户模式运行
@恢复任务上下文(TaskContext) 结束
经常有很多小伙伴抱怨说:不知道学习鸿蒙开发哪些技术?不知道需要重点掌握哪些鸿蒙应用开发知识点?
为了能够帮助到大家能够有规划的学习,这里特别整理了一套纯血版鸿蒙(HarmonyOS Next)全栈开发技术的学习路线,包含了鸿蒙开发必掌握的核心知识要点,内容有(ArkTS、ArkUI开发组件、Stage模型、多端部署、分布式应用开发、WebGL、元服务、OpenHarmony多媒体技术、Napi组件、OpenHarmony内核、OpenHarmony驱动开发、系统定制移植等等)鸿蒙(HarmonyOS NEXT)技术知识点。

《鸿蒙 (Harmony OS)开发学习手册》(共计892页):https://gitcode.com/HarmonyOS_MN
如何快速入门?
1.基本概念
2.构建第一个ArkTS应用
3.……
开发基础知识:
1.应用基础知识
2.配置文件
3.应用数据管理
4.应用安全管理
5.应用隐私保护
6.三方应用调用管控机制
7.资源分类与访问
8.学习ArkTS语言
9.……
基于ArkTS 开发
1.Ability开发
2.UI开发
3.公共事件与通知
4.窗口管理
5.媒体
6.安全
7.网络与链接
8.电话服务
9.数据管理
10.后台任务(Background Task)管理
11.设备管理
12.设备使用信息统计
13.DFX
14.国际化开发
15.折叠屏系列
16.……
鸿蒙开发面试真题(含参考答案):https://gitcode.com/HarmonyOS_MN
OpenHarmony 开发环境搭建

《OpenHarmony源码解析》:https://gitcode.com/HarmonyOS_MN
- 搭建开发环境
- Windows 开发环境的搭建
- Ubuntu 开发环境搭建
- Linux 与 Windows 之间的文件共享
- ……
- 系统架构分析
- 构建子系统
- 启动流程
- 子系统
- 分布式任务调度子系统
- 分布式通信子系统
- 驱动子系统
- ……

OpenHarmony 设备开发学习手册:https://gitcode.com/HarmonyOS_MN

写在最后
如果你觉得这篇内容对你还蛮有帮助,我想邀请你帮我三个小忙:
- 点赞,转发,有你们的 『点赞和评论』,才是我创造的动力。
- 关注小编,同时可以期待后续文章ing🚀,不定期分享原创知识。
- 想要获取更多完整鸿蒙最新学习资源,请移步前往


讨论HarmonyOS开发技术,专注于API与组件、DevEco Studio、测试、元服务和应用上架分发等。
更多推荐


 18
18 0
0- 0



 已为社区贡献62条内容
已为社区贡献62条内容

所有评论(0)