#跟着坚果学鸿蒙#开发指导
·
#跟着坚果学鸿蒙#场景介绍 • 通过方向传感器数据,可以感知用户设备当前的朝向,从而达到为用户指明方位的 目的。 • 通过重力和陀螺仪传感器数据,能感知设备倾斜和旋转量,提高用户在游戏场景中 的体验。 • 通过接近光传感器数据,感知距离遮挡物的距离,使设备能够自动亮灭屏,达到防 误触目的。 • 通过气压计传感器数据,可以准确的判断设备当前所处的海拔。 • 通过环境光传感器数据,设备能够实现背光自动调节。
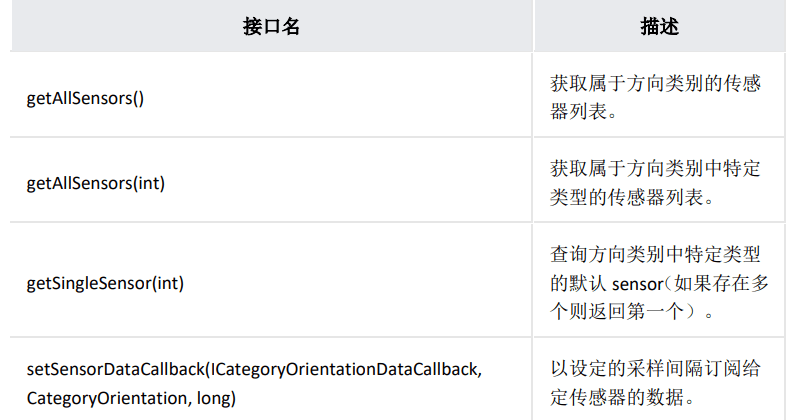
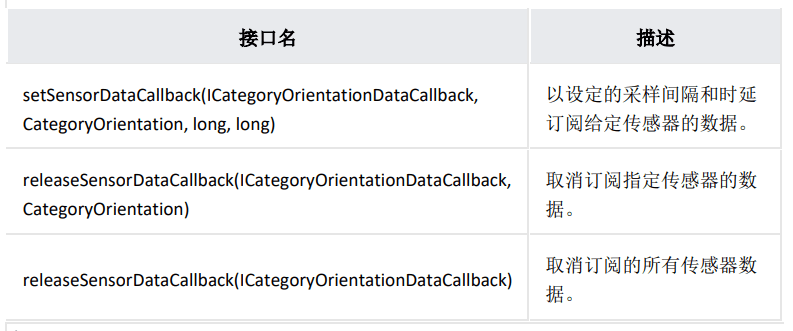
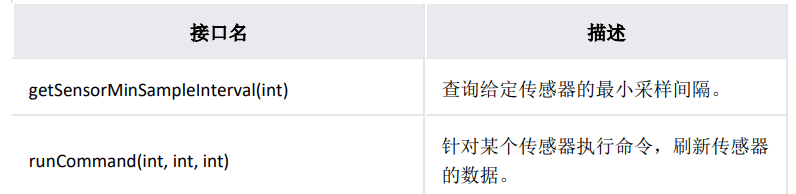
接口说明 HarmonyOS 传感器提供的功能有:查询传感器的列表、订阅/取消订阅传感器数 据、查询传感器的最小采样时间间隔、执行控制命令。 以订阅方向类别的传感器数据为例,本节示例涉及的接口如下:
开发步骤 权限配置 需要请求相应的权限,开发者才能获取到传 感器数据。
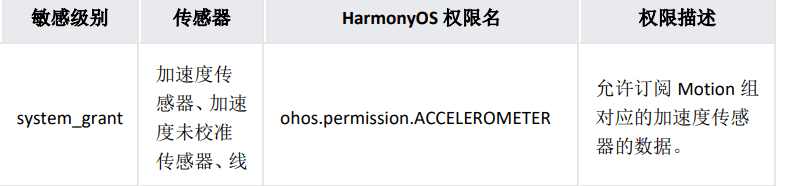
开发者需要在 config.json 里面配置权限: • 开发者如果需要获取加速度的数据,需要进行如下权限配置。
"reqPermissions": [
{
"name": "ohos.permission.ACCELEROMETER",
"reason": "",
"usedScene": {
"ability": [
".MainAbility"
],
"when": "inuse"
}
}
]
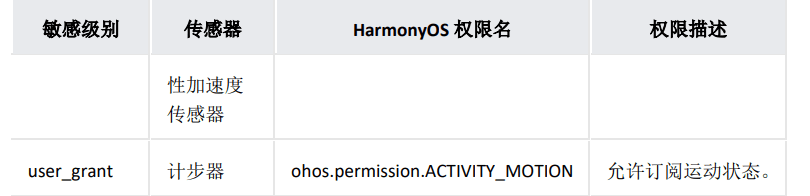
对于需要用户授权的权限,如计步器传感器,需要进行如下权限配置。
"reqPermissions": [
{
"name": "ohos.permission.ACTIVITY_MOTION",
"reason": "",
"usedScene": {
"ability": [
".MainAbility"
],
"when": "inuse"
}
}
]
由于敏感权限需要用户授权,因此,开发者在应用启动时或者调用订阅数据接口 前,需要调用权限检查和请求权限接口。
@Override
public void onStart(Intent intent) {
super.onStart(intent);
if (verifySelfPermission("ohos.permission.ACTIVITY_MOTION") != 0) {
if (canRequestPermission("ohos.permission.ACTIVITY_MOTION")) {
requestPermissionsFromUser(new String[]
{"ohos.permission.ACTIVITY_MOTION"}, 1);
}
}
// ...
}
@Override
public void onRequestPermissionsFromUserResult(int requestCode, String[]
permissions,
int[] grantResults) {
switch (requestCode) {
case 1: {
// 匹配 requestPermissionsFromUser 的 requestCode
if (grantResults.length > 0 && grantResults[0] == 0) {
// 权限被授予
} else {
// 权限被拒绝
}
return;
}
}
}
使用传感器 以使用方向类别的传感器为例,运动类、环境类、健康类等类别的传感器使用方 法类似。 1. 获取待订阅数据的传感器。 2. 创建传感器回调。 3. 订阅传感器数据。 4. 接收并处理传感器数据。 5. 取消订阅传感器数据。
private Button btnSubscribe;
private Button btnUnsubscribe;
private CategoryOrientationAgent categoryOrientationAgent = new
CategoryOrientationAgent();
private ICategoryOrientationDataCallback orientationDataCallback;
private CategoryOrientation orientationSensor;
private long interval = 100000000;
@Override
public void onStart(Intent intent) {
super.onStart(intent);
super.setUIContent(ResourceTable.Layout_sensor_layout);
findComponent(rootComponent);
// 创建传感器回调对象。
orientationDataCallback = new ICategoryOrientationDataCallback() {
@Override
public void onSensorDataModified(CategoryOrientationData
categoryOrientationData) {
// 对接收的 categoryOrientationData 传感器数据对象解析和使
用
int dim = categoryOrientationData.getSensorDataDim(); //
获取传感器的维度信息
float degree = categoryOrientationData.getValues()[0]; //
获取方向类传感器的第一维数据
}
@Override
public void onAccuracyDataModified(CategoryOrientation
categoryOrientation, int i) {
// 使用变化的精度
}
@Override
public void onCommandCompleted(CategoryOrientation
categoryOrientation) {
// 传感器执行命令回调
}
};
btnSubscribe.setClickedListener(v -> {
// 获取传感器对象,并订阅传感器数据
orientationSensor = categoryOrientationAgent.getSingleSensor(
CategoryOrientation.SENSOR_TYPE_ORIENTATION);
if (orientationSensor != null) {
categoryOrientationAgent.setSensorDataCallback(
orientationDataCallback, orientationSensor,
interval);
}
});
// 取消订阅传感器数据
btnUnsubscribe.setClickedListener(v -> {
if (orientationSensor != null) {
categoryOrientationAgent.releaseSensorDataCallback(
orientationDataCallback, orientationSensor);
}
});
} private void findComponent(Component component) {
btnSubscribe = (Button)
component.findComponentById(Resource.Id.btnSubscribe); btnUnsubscribe = (Button)
component.findComponentById(Resource.Id.btnUnsubscribe);
}

讨论HarmonyOS开发技术,专注于API与组件、DevEco Studio、测试、元服务和应用上架分发等。
更多推荐


 0
0 0
0- 0



 已为社区贡献50条内容
已为社区贡献50条内容

所有评论(0)