HarmonyOS7更新亮点实录43:Spatial Recon Kit 深度实践,3DGS 渲染管线深度编辑与 2D 图片的三维空间感重
HarmonyOS7更新亮点实录43:Spatial Recon Kit 深度实践,3DGS 渲染管线深度编辑与 2D 图片的三维空间感重构
文章目录
1. 业务背景与技术演进
随着终端设备向空间计算领域迈进,三维重建的焦点逐渐从传统的 NeRF(神经辐射场)转向了 3D Gaussian Splatting (3DGS,三维高斯溅射)。相比于 NeRF 需要庞大的光线追踪算力,3DGS 凭借其基于离散点云与协方差矩阵的栅格化技术,能在移动端实现 120 FPS 以上的高清自由视角渲染。
然而,3DGS 模型在过去一直存在一个工程痛点:它是难以编辑的。一旦 3DGS 点云生成,它就是一个整体的数学场,无法像传统的 Mesh(网格模型)那样去轻易地剔除或裁剪某一部分。
HarmonyOS 7.0 (API 26) 的 Spatial Recon Kit 彻底颠覆了这一现状:
- 深度结构编辑能力:新增支持直接编辑 3DGS 模型中的高斯球。开发者可以通过 API 对空间中的高斯簇进行框选、仿射变换、重新着色,甚至做像素级剔除(删除)。
- 2D到3D的空间照片推断:输入一张单目的 2D 平面照片,系统底层能利用 NPU 瞬时预测出深度图,并合成为带有空间视差感(Parallax Effect)的三维模型,让普通二维照片焕发空间感。
2. 3DGS 底层渲染管线与高斯球编辑原理
要理解如何“编辑”高斯球,我们必须剖析底层的渲染管线。3DGS 本质上不是由面片(Polygons)组成的,而是由数以百万计的椭球体(Gaussian Splats)在空间中叠加渲染而成的。每一个高斯球都包含以下数学属性:
- 位置(Position, XYZ):球在三维空间的三维坐标点。
- 协方差(Covariance):决定了高斯球的形状(缩放和旋转)。
- 球谐函数系数(Spherical Harmonics, SH):决定了不同视角下观察到的颜色,这是它具有光影反射体积感的核心。
- 不透明度(Opacity):决定了这个高斯球有多实。
HarmonyOS API 26 开放的高斯球编辑,实际上就是赋予开发者在显存态直接操作这些底层张量(Tensors)的能力。
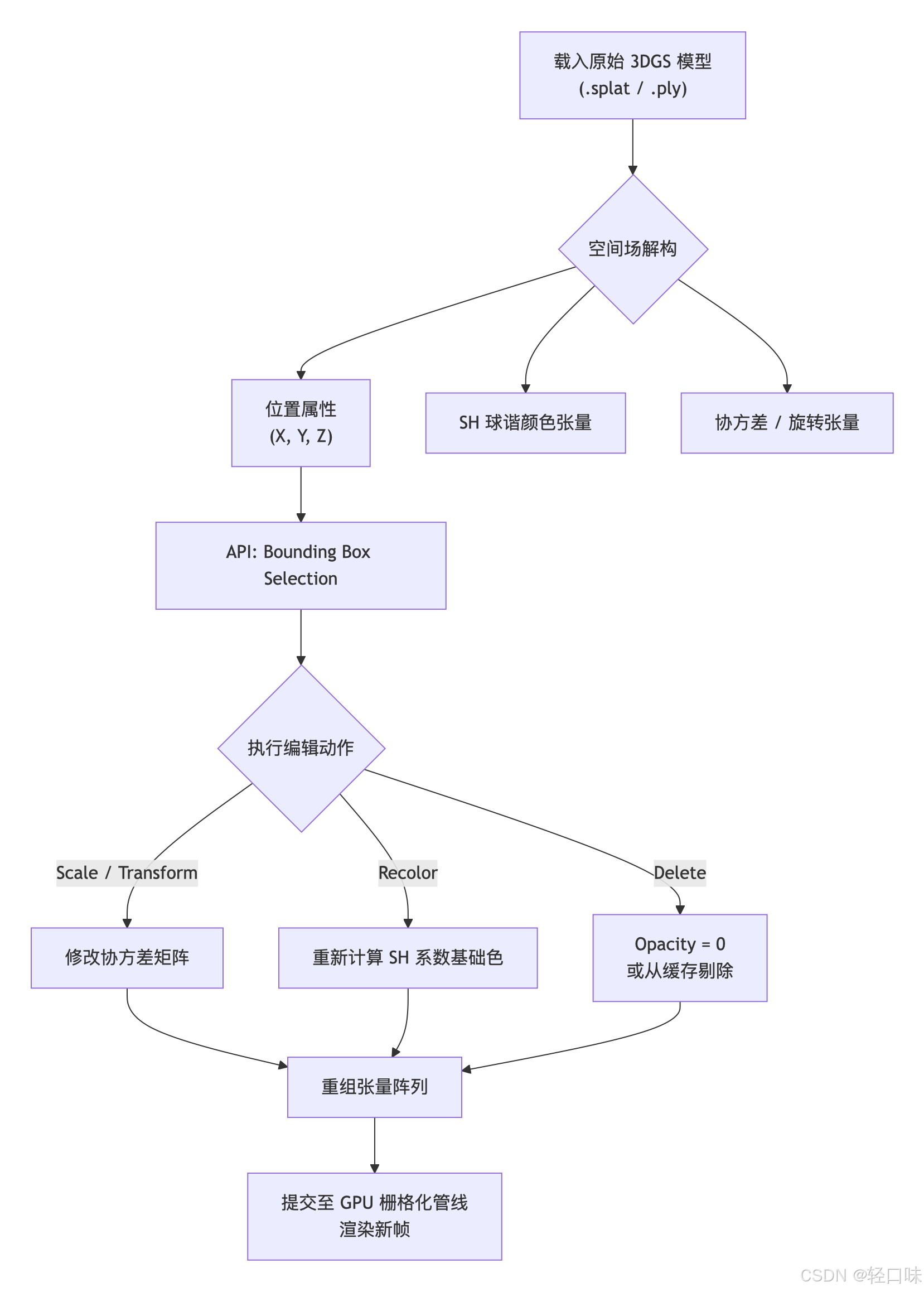
从架构图可以看出,当我们调用“删除”接口时,底层往往并非真正从内存中把那个节点 free 掉,而是修改了其不透明度权重或做 Alpha-Culling(透明度剔除),以维持计算管线的吞吐效率。
3. C++与ArkTS实战:操控 3DGS 模型与 2D 图片空间化
3.1 3DGS 模型的选择与删除操作
在 Spatial Recon Kit 中,如果我们需要剔除扫描场景中多余的物体(比如桌面扫描时把桌边不需要的茶杯也扫进去了),可以通过空间包围盒(Bounding Box)或画笔工具进行选择,然后删除。
import { spatialRecon } from '@kit.SpatialReconKit';
import { hilog } from '@kit.PerformanceAnalysisKit';
const TAG = 'SpatialGS_Editor';
export async function editGaussianModel(modelPath: string) {
try {
// 1. 加载 3DGS 模型实例
let gsModel = await spatialRecon.loadModel(modelPath);
hilog.info(0x0000, TAG, 'Successfully loaded 3DGS model into VRAM.');
// 2. 构建一个三维空间包围盒进行高斯球圈选
// 假设茶杯在空间坐标系中的位置,我们构建一个中心在 (x:1.0, y:0.0, z:-2.0),边长为 0.5 的包围盒
let selectionBox: spatialRecon.BoundingBox = {
center: { x: 1.0, y: 0.0, z: -2.0 },
extents: { x: 0.5, y: 0.5, z: 0.5 } // 长宽高各 0.5 米
};
// 3. 执行空间过滤,获取选中区域的高斯球句柄列表
let selectedSplats = await gsModel.select(selectionBox);
hilog.info(0x0000, TAG, `Selected ${selectedSplats.count} Gaussian splats within the bounding box.`);
// 4. 执行剔除 (删除) 操作
// 底层会将被选中点的不透明度参数置空,并触发 GPU 重新光栅化
await gsModel.deleteSplats(selectedSplats);
hilog.info(0x0000, TAG, 'Target object has been successfully erased from the scene.');
// 5. 保存编辑后的新模型
let newPath = modelPath + "_edited.splat";
await gsModel.saveModel(newPath);
} catch (error) {
hilog.error(0x0000, TAG, `Failed to process model: ${JSON.stringify(error)}`);
}
}
3.2 高阶应用:2D 图片的三维空间重构
API 26 的另一个震撼级能力是“单目空间照片生成”。一张平平无奇的手机 2D 照片,调用 API 即可转化为具有一定旋转幅度空间感的 3D 模型。
它的底层逻辑依赖于端侧 NPU 的深度估计大模型(Depth Estimation Model)。系统推断出每个像素的 Z 轴景深,然后将其反投影到三维点云中,再赋予原始像素的颜色值,生成 3DGS 或 Mesh 格式空间结构。
import { spatialRecon } from '@kit.SpatialReconKit';
import { image } from '@kit.ImageKit';
import { hilog } from '@kit.PerformanceAnalysisKit';
const TAG = 'SpatialImage_Recon';
export async function createSpatialImage(imagePixelMap: image.PixelMap): Promise<spatialRecon.SpatialImageModel> {
try {
hilog.info(0x0000, TAG, 'Start spatial image reconstruction...');
// 1. 初始化空间照片配置项
let config: spatialRecon.SpatialImageConfig = {
quality: spatialRecon.QualityLevel.HIGH, // 选择高质量重建,利用 NPU 的高精度推断
maxParallaxAngle: 15.0 // 最大允许合成 15 度视差的空间视角,防止边缘像素拉扯撕裂
};
// 2. 将 2D PixelMap 喂给底层重构服务
let spatialModel = await spatialRecon.generateSpatialImage(imagePixelMap, config);
hilog.info(0x0000, TAG, 'Spatial image successfully generated! Model can now be rendered in XR space.');
return spatialModel;
} catch (error) {
hilog.error(0x0000, TAG, `Spatial reconstruction failed, possibly due to OOM or NPU timeout: ${error}`);
throw error;
}
}
4. 稳定性边界:OOM 与算力防线
处理 3DGS 与空间照片时,最大的稳定性瓶颈在于显存/内存溢出(OOM)。
- 一张 4K 照片转空间点云时,会瞬间生成数以千万计的高斯球节点,占用海量连续内存。
- 开发者必须对传入的
PixelMap尺寸进行严格的下采样(Downsampling)限制。 - 如果同时在进行高强度的编辑操作,建议开启任务队列进行串行调度,切忌在主线程并发创建多个
gsModel句柄,否则底层GraphicEngine会因 FD 耗尽而直接触发系统级冻屏(Freeze)。
5. 总结
HarmonyOS 7.0 引入的 Spatial Recon Kit 将“空间计算”从昂贵的专业激光雷达设备下放到了所有的通用智能终端。高斯球编辑机制解构了原先 3DGS 的黑盒特性,使得端侧轻量化三维修图成为可能;而 2D 转 3D 空间照片能力则为 XR 头显、裸眼 3D 平板等硬件矩阵提供了极其廉价且丰沛的内容生态补给。可以预见,未来的相册与图库应用,将不可逆转地向三维全息化全面进军。

讨论HarmonyOS开发技术,专注于API与组件、DevEco Studio、测试、元服务和应用上架分发等。
更多推荐

 6
6 0
0- 0



 已为社区贡献118条内容
已为社区贡献118条内容

所有评论(0)